Устройства ввода и вывода. Страница 7
§ 1.2. Устройство компьютера
Содержание урока
1.2.1. Процессор и системная плата
1.2.2. Устройства ввода информации
1.2.3. Устройства вывода информации
1.2.4. Оперативная память
1.2.5. Долговременная память
1.2.6. Типы персональных компьютеров
Лабораторная работа № 2-2 «Проектируем рабочее место с компьютером: периферийное оборудование»
Лабораторная работа № 2-2
«Проектируем рабочее место с компьютером: периферийное оборудование»
1. Проведите стрелки от устройств вывода информации к компьютеру и от компьютера к устройствам ввода информации.
2. В чем преимущества жидкокристаллических мониторов?
_________________________________
_________________________________
3. Соедините стрелками название характеристик монитора с их описанием.
Соедините стрелками название характеристик монитора с их описанием.
4. Какие три вида принтеров существуют?
1) ______________________________
2) ______________________________
3) ______________________________
5. Заполните таблицу, записав в ней достоинства и недостатки трёх видов принтеров и области их использования.
6. Какие достоинства и недостатки у перечисленных видов клавиатур? Заполните таблицу.
7. Какие факторы нужно учитывать при выборе клавиатуры для покупки?
_______________________________________________________________
8. Какие основные группы клавиш можно выделить на стандартной клавиатуре и каково их назначение?
1) ______________________________
2) ______________________________
3) ______________________________
4) ______________________________
5) ______________________________
9. Какая кнопка на клавиатуре служит для подтверждения ввода команды? ___
Какая кнопка на клавиатуре служит для подтверждения ввода команды? ___
10. В чем заключается слепой десятипальцевый набор текста?
_________________________________
_________________________________
11. Назовите координатные устройства ввода.
1) ______________________________
2) ______________________________
3) ______________________________
12. Почему координатные устройства ввода так называются?
_________________________________
_________________________________
13. Какие виды мышей существуют (верное подчеркните)?
ручная
механическая
оптико-механическая
оптическая
звуковая
инфразвуковая
радио
инфракрасная
ультрафиолетовая
14. К каким портам компьютера можно подключать мышь?
___________________________________________________________
15. Запишите основные параметры, на которые следует обращать внимание при выборе манипулятора мышь:
Запишите основные параметры, на которые следует обращать внимание при выборе манипулятора мышь:
1) ______________________________
2) ______________________________
3) ______________________________
16. Какое устройство часто используются в портативных и мобильных компьютерах вместо манипулятора типа мышь?
________________________________________________________
17. Какие устройства используются для рисования и ввода рукописного текста?
________________________________________________________
18. Для чего используются следующие виды сканеров?
Планшетные: ____________________
Рулонные: _____________________
Ручные: _______________________
Построчные: ___________________
19. Какие основные параметры определяют характеристики сканеров?
1) ______________________________
2) ______________________________
3) ______________________________
20.
_________________________________
21. Какие устройства предназначены для ввода звуковой информации в компьютер?
_________________________________
22. Какие устройства используются для более удобного управления ходом компьютерных игр?
_________________________________
23. Запишите информационную емкость:
CD-диска: _________________
DVD-диска: _________________
24. Что общего и чем различаются флеш-карта и флеш-диск?
Общее: _____________________
Различия: ______________________
Выводы
Основной вид моей деятельности:
__________________________________
Поэтому я выбираю следующие периферийные устройства.
1. Монитор _______
Монитор _______
Обоснование выбора:____________
_________________________________
_________________________________
2. Клавиатуру ______
Обоснование выбора:____________________
_________________________________
_________________________________
3. Мышь ___________
Обоснование выбора:__________________
_________________________________
_________________________________
4. Звуковые колонки _____
Обоснование выбора:_________________________
_________________________________
_________________________________
5. Принтер _____________
Обоснование выбора:________________________
_________________________________
_________________________________
6.
Обоснование выбора:_______________________
_________________________________
_________________________________
Я выбираю дополнительные периферийные устройства:
_________________________________
_________________________________
Обоснование выбора: _____________
_________________________________
_________________________________
Оценка учителя: ___
Cкачать материалы урока
Проверочная работа по теме «Устройство компьютера»
Пояснительная записка
Цели: систематизация представления об основных устройствах компьютера и их функциях, активизация познавательной деятельности учащихся на уроках через игровые средства обучения.
Задачи:
образовательные:
обобщить основные знания о роли компьютера в жизни современного человека, об основных характеристиках компьютера;
развивающие:
развивать способность увязать знания об основных возможностях компьютера с собственным жизненным опытом; интерес к изучению вопросов, связанных с историей вычислительной техники; содействовать формированию самостоятельной познавательной деятельности.
воспитательные:
содействовать повышению уровня мотивации на уроках через игровые средства обучения; воспитывать коммуникативные навыки работы в парах.
УУД:
личностные: ответственное отношение к учению, готовность и способность к саморазвитию и самообразованию на основе мотивации к обучению и познанию.
регулятивные: умение определять действия в соответствии с учебной и познавательной задачей.
познавательные: умение определять понятия, устанавливать аналогии, устанавливать причинно-следственные связи;
коммуникативные: умение организовывать учебное сотрудничество и совместную деятельность с учителем и сверстниками.
Данную работу можно использовать как в 7 классе, так и в других классах для повторения темы «Устройства компьютера. Задания составлены таким образом, что их можно использовать отдельно для актуализации знаний на различных уроках. Работа рассчитана на 40 минут.
Инструкция
Задание 1 (6 мин) представляет собой кроссворд по теме «Устройства ввода информации» как в бумажном, так и в электронном виде. Выполнив это задание, учащиеся узнают второе название понятия «сенсорный экран». В кроссворде 9 слов. За каждое отгаданное слово ученик зарабатывает 1 балл. Итого – 9 баллов. Имеются слова для справок.
Задание 2 (6 мин) представляет собой головоломку по теме «Устройства вывода информации».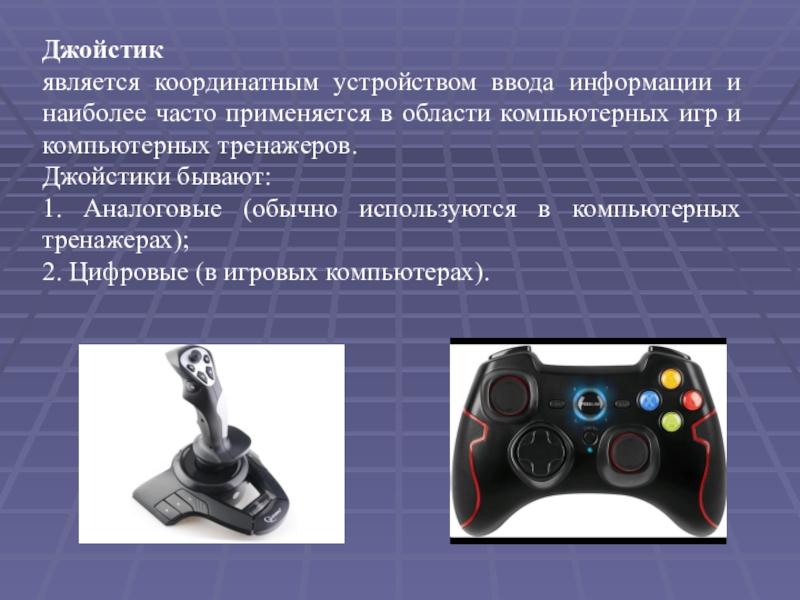 Учащимся необходимо выбрать все слова, обозначающие устройства вывода. Вписать эти слова в соответствующие определения этих понятий. За каждый правильный ответ 1 балл. Итого 5 баллов. Если ученик только выписал все слова, но не сопоставил с понятием, то за задание он получает 2 балла.
Учащимся необходимо выбрать все слова, обозначающие устройства вывода. Вписать эти слова в соответствующие определения этих понятий. За каждый правильный ответ 1 балл. Итого 5 баллов. Если ученик только выписал все слова, но не сопоставил с понятием, то за задание он получает 2 балла.
Задание 3 (4 мин) представляет собой головоломку «Характеристики монитора». Необходимо выписать все характеристики. За каждое найденное правильное слово 1 балл. Итого 6 баллов.
Задание 4 (4 мин) представляет собой таблицу, в первом столбце которой находится 4 характеристики монитора, во втором 6 названий. Необходимо сопоставить (можно соединить стрелочками) данные характеристики и их названия. За выполнение этого задания учащийся получает 1 балл за каждое правильное сопоставление. Итого 4 балла.
Задание 5 (8 мин) представляет собой таблицу, в которой находится название, картинка и определение 10 устройств ввода. Необходимо сопоставить каждую картинку с названием и определение. В ответ записать трехзначное число (1-я цифра — № картинки, 2-я — № названия, 3-я — № определения ) За каждое правильное сопоставление 1 балл. Итого 10 баллов.
В ответ записать трехзначное число (1-я цифра — № картинки, 2-я — № названия, 3-я — № определения ) За каждое правильное сопоставление 1 балл. Итого 10 баллов.
Задание 6 (2 мин) Необходимо дать определение понятия. 1 балл
Задание 7 (4 мин) представляет собой облако слов, из которого необходимо выбрать все существующие виды компьютерных мышей. За каждое правильное слово 1 балл. Итого 7 баллов
Задание 8 (2 мин) Ответить на вопрос. 2 балла
Задание 9 (4) Необходимо соединить стрелками объекты. За каждый верный ответ 1 балл. Итого 6 баллов
Оценивание:
40 — 50 баллов – оценка «5»
26 — 39 баллов – оценка «4»
11 — 25 баллов – оценка «3»
0-10 баллов – оценка «2»
Головоломки «Устройства вывода информации» и «Характеристики монитора» созданы на сайте www. chiddevelop.ru (генератор: https://childdevelop.ru/generator/letters/puzzle.html)
chiddevelop.ru (генератор: https://childdevelop.ru/generator/letters/puzzle.html)
Облако «Виды мышей» создано на сайте https://wordscloud.pythonanywhere.com/
Кроссворд «Устройства ввода информации» создан в программе MS Excel.
Задание 1. Разгадайте кроссворд «Устройства ввода информации» и определите все устройства ввода информации.
1.Существует устройство ввода и вывода информации, представляющее собой экран, реагирующий на прикосновении к нему – это сенсорный экран. У него есть второе название. Разгадайте кроссворд и вы узнаете другое название этого устройства.
2. Устройство ввода информации в персональном компьютере, которое представляет собой качающуюся в двух плоскостях вертикальную ручку.
3. Устройство, позволяющее пользователю вводить информацию в компьютер. Представляет собой набор клавиш, расположенных в определенном порядке.
4. Указательное устройство ввода, предназначенное для управления курсором и отдачи различных команд компьютеру, телефону или другому электронному оборудованию.
5. Устройство ввода, которое анализирует какой-либо объект, создает его цифровое изображение.
6. Ручное указательное устройство ввода информации для компьютера, позволяет вводить информацию об относительном перемещении путем вращения рукой закрепленного в корпусе шара и подавать команды нажатиями на кнопки.
7. Прибор, предназначенный для создания действительного изображения плоского предмета небольшого размера на большом экране.
8. Устройство для преобразования звуковых волн в электронный сигнал, который можно записывать и передавать.
9. Устройство для ввода информации, созданной от руки человека, непосредственно в компьютере.
Задание 2. Расшифруйте головоломку «Устройства вывода информации». Впишите полученные слова в соответствующие определения.
Впишите полученные слова в соответствующие определения.
Слова для справок к заданию 1 и 2: клавиатура, графический планшет, сканер, принтер, материнская плата, графопостроитель, плоттер, трекбол, проектор, мышь, цифровая видеокамера, тачпад, процессор, колонки, монитор, джойстик, микрофон
- Впишите полученные слова в соответствующие определения.
_____________________ — устройство визуального отображения всех видов информации, подключаемое к видеокарте ПК.
____________________ — устройство, предназначенное для вывода числовой, текстовой и графической информации на бумажный носитель.
____________________ — устройство обеспечивающее передачу на большой экран информации от внешнего источника.
____________________ — устройство для вывода звуковой информации, которые подключаются к выходу звуковой платы.
Задание 3. Головоломка «Характеристики монитора»
Разгадайте головоломку и определите характеристики монитора
_____________________________________________________________________________
Задание 4. Сопоставьте названия характеристик монитора с их описанием.
Описание характеристик | Название характеристик |
А. Для того чтобы комфортно работать с монитором, имеющим маленькие значения этой характеристики, вам нужно находиться прямо перед экраном. Как только вы сдвинетесь вбок, изображение визуально будет искажаться. Чем больше значение этой характеристики, тем свободнее вы можете быть в перемещениях по комнате. | 1. Максимальное разрешение |
Б. | 2. Диагональ экрана
|
3. Яркость
| |
В. Представьте себе тусклый фонарик. В полутёмной комнате его будет видно, но как только вы включите люстру, его слабый свет потеряется. Так же и с монитором. Чем больше у него этот показатель, тем лучше вам будет видно происходящее на экране, даже если на монитор будут попадать солнечные лучи из окна. | 4. Контрастность
|
5. Углы обзора | |
Г. Чем меньше эта величина, тем более чёткую картинку вы будете видеть в экшн-сценах фильмов и игр. Это значит, что чем быстрее пиксели сменяют друг друга, тем меньше будет размазываться картинка, тем менее заметным будет «шлейф» каждой детали, из-за которого изображение как будто покрывается лёгким флёром. |
6. Время отклика |
 Первое, что нужно выбрать, приобретая ЖК-монитор, – это характеристика монитора, которая устроит вас по размеру и цене. Нет смысла покупать монитор с большим значением этой характеристики, если вы работаете только с офисными приложениями. Но если вы используете компьютер не только для работы, но и для просмотра фильмов, вам стоит обратить внимание на мониторы с большим значением этой характеристики. На них комфортно смотреть киноленты.
Первое, что нужно выбрать, приобретая ЖК-монитор, – это характеристика монитора, которая устроит вас по размеру и цене. Нет смысла покупать монитор с большим значением этой характеристики, если вы работаете только с офисными приложениями. Но если вы используете компьютер не только для работы, но и для просмотра фильмов, вам стоит обратить внимание на мониторы с большим значением этой характеристики. На них комфортно смотреть киноленты.
Задание 5. Сопоставьте картинку, название и определение устройств.
Задание 6. Почему координатные устройства ввода так называются?___________________
Задание 7. Используя облако слов, укажите, какие существуют виды мышей.
Используя облако слов, укажите, какие существуют виды мышей.
___________________________________________________________________
Задание 8. К каким портам компьютера можно подключать мышь?
Задание 9. Выберите устройства, которые входят в базовую комплектацию компьютера (соедините стрелками).
Источники:
Головоломки «Устройства вывода» и «Характеристики монитора» созданы на сайте www.chiddevelop.ru
Облако «Виды мышей» создано на сайте https://wordscloud.pythonanywhere.com/
Информация «Характеристики монитора» взяты с сайта http://homememos.ru/monitor/
Информация «Координатные устройства» взяты с сайта https://pclegko.ru/ustroistva-kompyutera/ustroystva-vvoda-komputera.html
Интернет-ресурсы картинок:
Человечек за компьютером http://ibb. com.ua/foto/96/2647596b.jpg
com.ua/foto/96/2647596b.jpg
Компьютер http://moodle.sch459.spb.ru/pluginfile.php/1919/course/overviewfiles/5%20класс.jpg
Мышь https://pclegko.ru/wp-content/uploads/2016/03/myish-300×248.jpg
тачпад https://pclegko.ru/wp-content/uploads/2016/03/touchpad.png
трекпоинт https://pclegko.ru/wp-content/uploads/2016/03/trekpoint.jpg
джойстик https://pclegko.ru/wp-content/uploads/2016/03/dzhoystik-300×295.jpg
геймпад https://pclegko.ru/wp-content/uploads/2016/03/ustroystva-vvoda-informatsii-1-300×300.jpg
сканер https://pclegko.ru/wp-content/uploads/2016/03/skaner-300×201.jpg
Планшет https://pclegko.ru/wp-content/uploads/2016/03/graficheskiy-300×182.jpg
ТВ-тюнер https://pclegko.ru/wp-content/uploads/2016/03/tv-tyuner.jpg
камера https://pclegko.ru/wp-content/uploads/2016/03/tsifrovaya-kamera-300×300. jpg
jpg
микрофон https://pclegko.ru/wp-content/uploads/2016/03/ustroystva-vvoda-informatsii-300×300.jpg
Две мыши https://setafi.com/wp-content/uploads/2019/02/5984
Кроссворд «Устройства ввода информации»
XLSX / 212.71 Кб
Лекционный материал по теме «Внешние устройства, подключаемые к компьютеру»
Лекция № 38 «Внешние устройства, подключаемые к компьютеру»
1. Устройства ввода
Компьютеру, как и человеку, необходимы свои «глаза и уши», с помощью которых он мог бы воспринимать информацию извне. В настоящее время имеются разнообразные устройства, выполняющие эти функции в составе компьютера. Они называются устройствами ввода, так как обеспечивают ввод в компьютер данных в различных формах: чисел, текстов, изображений, звуков.
Устройства ввода преобразуют эту информацию из формы, понятной человеку, в цифровую форму, воспринимаемую компьютером.
Современные
компьютеры могут обрабатывать числовую, текстовую, графическую, звуковую и
видеоинформацию.
Клавиатура — компьютерное устройство, которое располагается перед экраном дисплея и служит для набора текстов и управления компьютером с помощью клавиш, находящихся на клавиатуре.
Клавиатура позволяет вводить в компьютер числовую и текстовую информацию, а также различные команды и данные.
Микрофон используется для ввода звуковой информации, подключается к входу звуковой карты.
Сканер — устройство для перевода графической информации в цифровую.
Сканер используется для оптического ввода в компьютер и преобразования в компьютерную форму изображений (фотографий, рисунков, чертежей).
Сканеры
используются и для бесклавиатурного ввода текста. Всякую информацию сканер
воспринимает как графическую. Если это был текст, который в другом случае
пришлось бы набирать вновь, то после работы сканера специальная программа
распознавания текста, позволяющая выделить в считанном изображении отдельные
символы и сопоставить им соответствующие коды символов, преобразовывает его в
пригодный для обработки текст.
Веб-камера — малоразмерная цифровая видео или фотокамера, способная в реальном времени фиксировать видеоизображения, предназначенные для дальнейшей передачи по компьютерной сети.
Цифровые камеры позволяют получать видеоизображение и фотоснимки непосредственно в цифровом (компьютерном) формате. Позволяют вводить
в компьютер графическую информацию.
Сенсорный экран — устройство ввода информации, представляющее собой экран, реагирующий на прикосновения к нему.
Графический планшет (дигитайзер). Графический планшет (со световым пером) — это устройство для ввода рисунков от руки и рукописного текста непосредственно в компьютер.
Графический планшет состоит из пера и плоского планшета, чувствительного к нажатию или близости пера. Дигитайзер — это ещё одно устройство ввода графической информации.
Специальные
датчики,
присоединяемые к компьютеру, позволяют измерять и вводить в его
память такие числовые характеристики окружающей среды как
температура, влажность, давление и многое другое.
Устройства речевого ввода. Средства речевого ввода позволяют пользователю вместо клавиатуры, мыши и других устройств использовать речевые команды (или проговаривать текст, который должен быть заранее занесен в память компьютера). Возможности таких устройств пока достаточно ограничены.
Указательные устройства ввода информации
Указательные(координатные) устройства ввода информации осуществляют непосредственный ввод информации, указывая курсором на экране монитора команду или место ввода данных. Данные устройства позволяют перемещать курсор или другие объекты соответствующих программ по двухмерному пространству экрана монитора с целью облегчения взаимодействия пользователя с компьютером при вводе информации.
Рассмотренные устройства ввода образуют группу устройств — манипуляторов.
Мышь. При её перемещении по коврику на экране перемещается указатель мыши, при помощи которого можно указывать на объекты и/или выбирать их.
Используя
клавиши мыши, можно задать тот или иной тип операции с объектом.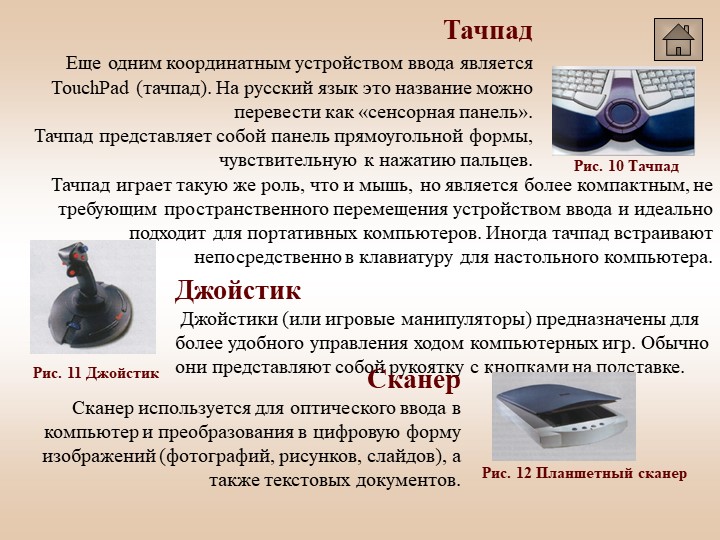
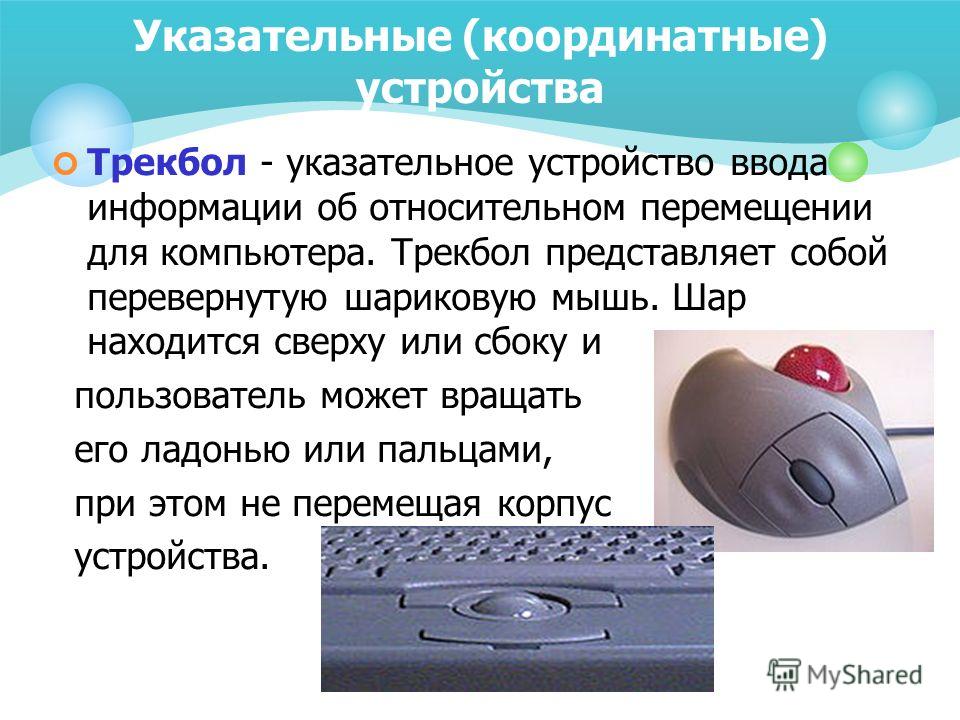
Трекбол. По принципу действия трекбол (Track ball) лучше всего сравнить с мышкой, которая лежит на столе «брюшком» вверх.
Джойстик — устройство управления в компьютерных играх. Представляет собой рычаг на подставке, который можно отклонять в двух плоскостях.
Джойстик входит в необходимый игровой набор для компьютера, применяют его и в различных программах тренажёрах и обучающих симуляторах (наряду с виртуальными шлемами, рулями и т.п.).
Сенсорный экран — устройство ввода информации, представляющее собой экран, реагирующий на прикосновения к нему.
Тачпад служит для перемещения курсора в зависимости от движений пальца пользователя и используется для замены мыши в ноутбуках. Для перемещения курсора на весь экран достаточно небольшого перемещения пальца по поверхности тачпада.
Световое перо внешне имеет вид шариковой ручки или карандаша, соединённого проводом с одним из портов ввода-вывода компьютера.
Обычно
на световом пере имеется одна или несколько кнопок, которые могут нажиматься
рукой, удерживающей перо. Ввод данных с помощью светового пера заключается в
прикосновениях или проведении линий пером по поверхности экрана монитора. В
наконечнике пера устанавливается фотоэлемент, который регистрирует изменение
яркости экрана в точке, с которой соприкасается перо, за счёт чего
соответствующее программное обеспечение вычисляет позицию, «указываемую» пером
на экране и может, в зависимости от необходимости, интерпретировать её тем или
иным образом, обычно как указание на отображаемый на экране объект или как
команду рисования.
Ввод данных с помощью светового пера заключается в
прикосновениях или проведении линий пером по поверхности экрана монитора. В
наконечнике пера устанавливается фотоэлемент, который регистрирует изменение
яркости экрана в точке, с которой соприкасается перо, за счёт чего
соответствующее программное обеспечение вычисляет позицию, «указываемую» пером
на экране и может, в зависимости от необходимости, интерпретировать её тем или
иным образом, обычно как указание на отображаемый на экране объект или как
команду рисования.
К указательным устройствам относятся также сенсорный экран и графический планшет (дигитайзер).
2. Устройства вывода
Устройства вывода предназначены для передачи информации от компьютера к пользователю.
Основными устройствами вывода являются монитор, принтер, плоттер акустические колонки, наушники.
Монитор — это устройство для визуального отображения (вывода) текстовой и графической информации.
Самым распространенным в настоящее время типом мониторов являются
жидкокристаллические мониторы LCD. Однако еще достаточно большое число
пользователей применяют устаревшие мониторы с электронно-лучевой трубкой
(CRT-мониторы). Существуют также газоплазменные мониторы, которые пока являются
достаточно большой редкостью ввиду их высокой цены.
Однако еще достаточно большое число
пользователей применяют устаревшие мониторы с электронно-лучевой трубкой
(CRT-мониторы). Существуют также газоплазменные мониторы, которые пока являются
достаточно большой редкостью ввиду их высокой цены.
CRT-мониторы {Cathode Ray Tube — «катодно-лучевая трубка», рисунок 1). В основе этих мониторов лежит катодно-лучевая или электронно-лучевая трубка (ЭЛТ). Внутри этой трубки вакуум.
Важной характеристикой мониторов является разрешающая способность, которая определяется количеством пикселей, размещающихся по горизонтали и вертикали монитора. Современные мониторы должны обеспечивать разрешающую способность не менее 1024 х 768 пикселей.
Жидкокристаллические (ЖК) мониторы (LCD — Liquid Crystal Display,
рисунок 2) используют так называемые жидкие кристаллы, которые могут изменять
свою структуру и прозрачность под действием электрического напряжения. Когда
нет электрического заряда, жидкие кристаллы находятся в аморфном состоянии и
пропускают свет. Количеством света, проходящего через жидкие кристаллы, можно
управлять с помощью электрических зарядов.
Количеством света, проходящего через жидкие кристаллы, можно
управлять с помощью электрических зарядов.
Преимуществами жидкокристаллических мониторов являются их компактность, низкое энергопотребление, отсутствие электромагнитного излучения, высокие уровни яркости. Однако, в отличие от CRT-мониторов, у LCD-мониторов есть такая характеристика, как стандартное разрешение. Только в стандартном разрешении ЖК-монитор воспроизводит изображение наиболее качественно. Разрешение больше стандартного нельзя установить в принципе. При уменьшении разрешения изображение становится нечетким, с «зазубринами». Также, по сравнению с мониторами ЭЛТ, у жидкокристаллических мониторов хуже точность цветопередачи. Существенным недостатком является зависимость контрастности от угла обзора.
Принтер — это устройство для вывода цифровой информации на бумагу.
Существуют три основных типа принтеров: матричные, струйные и лазерные.
Матричные принтеры (Рисунок 3) формируют изображение построчно с помощью
печатающей головки, которая ударяет по бумаге через красящую ленту. Головка
содержит ряд иголок (pin), от количества которых зависит качество
изображения.
Головка
содержит ряд иголок (pin), от количества которых зависит качество
изображения.
В настоящее время этот тип принтеров устарел из-за большого количества недостатков, таких как низкая скорость печати, высокий уровень шума при работе, низкое качество изображения. К плюсам можно отнести невысокую стоимость расходных материалов и возможность печати на бумаге практически любого качества.
Струйные принтеры (Рисунок 4) печатают путем набрызгивания чернил на бумагу через мелкие сопла в печатающей головке. В черно-белых принтерах используется один цвет краски (черный), в цветных принтерах — голубой, пурпурный и желтый. В более дорогих моделях цветных принтеров к трем базовым цветам добавляется черный, так как чисто черный цвет с помощью трех базовых цветов получить невозможно. Стоимость самих струйных принтеров обычно невысока, но зато очень высока стоимость расходных материалов (картриджей, наполненных чернилами).
Кроме того, для струйного принтера нужна бумага высокого качества,
иначе краска будет расплываться. Скорость печати струйных принтеров (особенно
цветных) очень невысока. Но, несмотря на все недостатки, струйные принтеры
широко распространены, так как они обеспечивают достаточно высокое качество
печати.
Скорость печати струйных принтеров (особенно
цветных) очень невысока. Но, несмотря на все недостатки, струйные принтеры
широко распространены, так как они обеспечивают достаточно высокое качество
печати.
В лазерных принтерах изображение создается путем переноса на бумагу специального порошка (тонера). Источник света (лазер) освещает предварительно заряженную поверхность фотобарабана. На тех местах, куда попал свет, меняется заряд, и к ним притягивается тонер. Затем тонер за счет электростатики переносится на бумагу, после чего попадает в печку, где и закрепляется под действием высокой температуры. Качество такого изображения очень высокое. Так как лазерные принтеры формируют изображение постранично, а не построчно (как матричные и струйные принтеры), то и скорость их работы достаточно высока. Скорость работы лазерных принтеров измеряется в страницах в минуту. Современные принтеры обеспечивают скорость печати 20-40 страниц в минуту.
Лазерные принтеры могут быть монохромными или цветными, однако
цветные принтеры очень дороги. Основным недостатком лазерных принтеров является
высокая стоимость. К достоинствам (помимо высокого качества печати и скорости)
можно отнести низкий уровень шума, долговечность полученных отпечатков,
невысокую стоимость расходных материалов. Картриджа для лазерного принтера
хватает на достаточно большое количество отпечатков.
Основным недостатком лазерных принтеров является
высокая стоимость. К достоинствам (помимо высокого качества печати и скорости)
можно отнести низкий уровень шума, долговечность полученных отпечатков,
невысокую стоимость расходных материалов. Картриджа для лазерного принтера
хватает на достаточно большое количество отпечатков.
Графопостроитель (плоттер) — устройство для вывода данных в графической форме на бумагу, пластик, фоточувствительный материал или иной носитель путем черчения.
Компьютерные колонки и наушники — устройства для вывода оцифрованного звука. Компьютерные колонки (динамики) бывают разного качества: от недорогих пластиковых до дорогих стереосистем с высококачественным звуком. Усилитель в компьютерных колонках встроен прямо в них и не нуждается в отдельном подключении. Часто применяется система из нескольких (двух, четырех или пяти) колонок с сабвуфером, который усиливает звучание низких частот, плохо воспринимаемых человеческим ухом.
3. Устройства
хранения информации
Устройства
хранения информации
Дискета — носитель информации, который представляет собой гибкий диск с покрытием ферромагнитным материалом и отверстие в центре для обеспечения вращения приводом и такой диск помещен в специальный пластмассовый корпус. Запись и чтение информации производится с помощью двух электромагнитных катушек, установленных по обе стороны магнитного диска (так как диски являются двухсторонними) и перемещаемые по радиусу дисков на системе привода головок. Для хранения информации применяется термин дорожка – узкая концентрическая полоска на диске, и цилиндр – совокупность дорожек, которые могут считать головки без изменения своего положения.
Скорость вращения двигателя гибкого диска при работе составляет от 300 до 360 оборотов в минуту.
Имеется два основных размера диска: 3,5´´ и 5,25´´ (а первые дискеты имели размер 8 дюймов).
HDD (Hard
Disk Drive — устройство управления жестких дисков), иливинчестер, имеет также название накопитель
для жестких дисков, просто жесткие диски, дисководы жестких дисков (на практике
— винт), накопитель на жестких дисках (НМЖД), HMDD (Hard Magmetic Disk Drive)
и предназначен для хранения основной информации пользователя.
Основным отличием жестких дисков от оперативной памяти является то, что при выключении компьютера данные сохраняются, а не уничтожаются, как в оперативной памяти.
Физически жесткие диски устроены аналогично гибким
дискам, за исключением того, что в накопителе может находиться не одна
пластина, а несколько, расположенных одна под другой, при этом у каждой
пластины сверху и снизу находится по магнитной головке. Кроме того, для хранения информации
используется не гибкие, а жесткие диски из алюминия либо стеклянные, покрытые
слоем магнитного материала (ферромагнетика из сплавов железа, марганца и др).
Как и в гибких дисководах, головки жестко связаны между собой и расположены
одна под другой. Для перемещения одной головки перемещаются и другие, поэтому
совокупность головок называется блоком
головок. При их фиксированном расположении каждая головка может
считывать информацию только с одной дорожки (дорожка — это область в виде узкого кольца на
диске, которая считывается головкой без ее смещения), эти дорожки в
совокупности всех дисков называются цилиндром.
Общий объем диска рассчитывается по формуле: емкость диска = число цилиндров (или дорожек на одной поверхности) х количество головок (или количество рабочих поверхностей) х размер кластера.
Жесткие диски названы так потому, что твердые пластины с
намагниченным слоем жестко устанавливаются в устройстве на заводе и являются
несъемными в отличие от гибких дисков. Из-за большой скорости вращения дисков
может возникнуть резонанс,
поэтому устройство должно быть прочно укреплено в системном блоке,
зафиксировано винтами во всех необходимых местах и находиться в горизонтальном
или вертикальном положении. Еще одно неприятное действие вращающихся дисков
— эффект гироскопа,
потому скорость вращения дисков для ноутбуков несколько ниже, чем у стационарных
компьютеров, у которых системный блок неподвижен. При работе считывающие
головки расположены очень близко от рабочей поверхности. Винчестер не следует
разбирать, так как попадание малейшей пыли выведет его из строя, и, кроме того,
он центрирован на заводе, а в домашних условиях этого сделать невозможно.
Логическая структура диска. Существует несколько видов файловой системы: FAT имеет несколько стандартов: FAT12, FAT16, FAT32 и exFAT. Цифры обозначают число бит, используемых для адреса сектора.
NTFS создана компанией Microsoft в 90-х годах для Windows NT. В отличие от FAT в ней записывается список изменений в главной файловой таблице (MFT), что позволяет восстановить систему после сбоя. Максимальный размер файла – 2 в степени 64 байтов, максимальное число файлов – 2 в степени 32, максимальная длина имени файла 255 из 16 битных слов.
Жесткие диски типа SSP (Solid-State
Drive – твердотельный накопитель), у которого вместо диска
установлена память на основе флэш-памяти. Компьютер считает, что на нем имеются
также оглавление, дорожки, сектора как на жестком диске. Контроллер жесткого
диска адрес в виде дорожек, секторов преобразует во внутренний адрес и таким
образом происходят операции с ним. Данный вид дисков более быстрый, бесшумный
(нет движущихся частей), но более дорогой.
Данный вид дисков более быстрый, бесшумный
(нет движущихся частей), но более дорогой.
Оптические накопители предназначены для чтения, записи/перезаписи с оптических дисков. Оптические диски представляют собой круглые и плоские по форме пластины из плотного материала (обычно, состоящие из поликарбоната) с нанесенными слоями, позволяющими хранить информацию в виде мельчайших ямок (пит, от pit — ямка, углубление). Процесс считывания производится лучом лазера, который отражаясь от поверхности диска, попадает в фотоэлемент, где свет преобразуется в электрический сигнал, величина которого позволяет декодировать записанную информацию.
Наиболее распространенные форматы оптических дисков для использования в персональных компьютерах– это CD, DVD, Blu-ray.
CD-ROM (Compact
Disc Read Only Memory, компакт-диск только с возможностью чтения)
разновидность компакт-дисков, которые появились в 1982 году в результате
исследования двух компаний – Sony и Philips. CD-ROM диски вначале развивались
как аналог виниловых дисков и предназначались для записи и проигрывания
музыкальной информации. Они также имеют одну концентрическую дорожку, которая
проходит от внешнего края к внутреннему, делая множество оборотов. Принцип
считывания информации оптический,
то есть луч лазера считывает данные, которые записаны на алюминиевой (или
другого вида) подложке. Кроме того, информация записана на диск, в отличие от
винилового диска, в цифровом, а не аналоговом виде, а после считывания
расшифровывается и переводится в звук. Для предохранения диска от порчи
алюминиевая подложка покрыта прозрачным пластиком.
CD-ROM диски вначале развивались
как аналог виниловых дисков и предназначались для записи и проигрывания
музыкальной информации. Они также имеют одну концентрическую дорожку, которая
проходит от внешнего края к внутреннему, делая множество оборотов. Принцип
считывания информации оптический,
то есть луч лазера считывает данные, которые записаны на алюминиевой (или
другого вида) подложке. Кроме того, информация записана на диск, в отличие от
винилового диска, в цифровом, а не аналоговом виде, а после считывания
расшифровывается и переводится в звук. Для предохранения диска от порчи
алюминиевая подложка покрыта прозрачным пластиком.
CD-R диск имеет такие же характеристики, как и CD-ROM, но позволяют записывать на них один раз информацию.
CD-RW диск имеет такие же характеристики, как и CD-ROM, но
позволяет не только записывать на них информацию, но и дозаписывать ее, также
стирать ранее записанные данные и записать новые.
Для работы с ними использовались CD-накопители.
DVD-диски (Digital Versatile Disc — цифровой универсальный диск) первоначально расшифровывалось как Digital video Disc — цифровой видеодиск. Эти диски имели большую емкость по сравнению с CD-ROM за счет уплотнения дорожек с записью. Это наиболее распространенный вид дисков, которые являются однослойными и односторонними. Двухслойные диски имеют два полупрозрачных слоя с мощной фокусировкой луча, позволяют считывать информацию либо с первого, либо со второго слоя. Более высокая плотность данных достигается за счет уменьшения области на диске для одного бита и применения методов сжатия.
Для работы с DVD используются DVD-накопители.
Стандарт Blu-ray Disc (BD) (blue ray — синий луч и disc — диск; написание blu вместо blue — намеренное) был разработан консорциумом BDA, выпущен в 2006 году.
Повышение объема записываемой информации выполняется
за счет использования лазерного луча в сине-фиолетовом диапазоне с более короткой длиной
405 нм, в то же время как CD и DVD приводы используют красный и инфракрасный
лазеры с длиной волны 650 нм и 780 нм.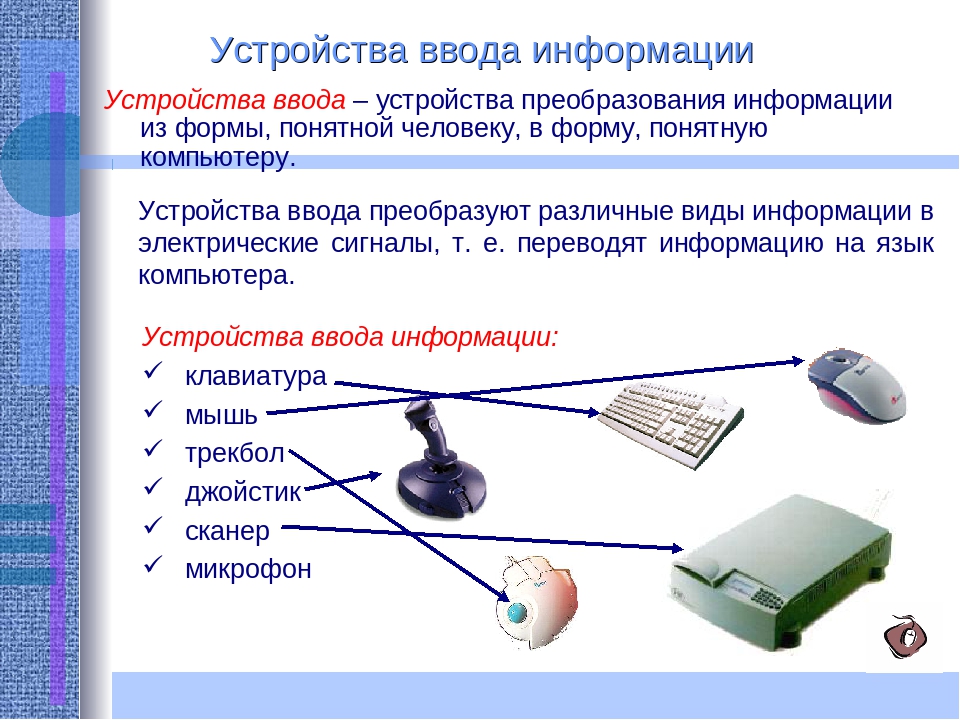
Скачано с www.znanio.ru
Устройства ввода информации. Координатные устройства ввода (мышь, тачпад, дигитайзер, игровые манипуляторы)
Устройства ввода – оборудование, с помощью которого можно вводить данные: клавиатура, мышь, джойстик, трекбол, тачпад, световое перо, сенсорные экраны, сканеры, цифровые камеры ТВ-тюнеры, системы распознавания речи, сенсорные датчики.
Координатные устройства ввода
Для ввода графической информации и для работы с графическим интерфейсом программ используются координатные устройства ввода информации: манипуляторы (мышь, трекбол), сенсорные панели тачпад и графические планшеты.
Мышь
Мышь — это манипулятор, предназначенный для ввода информации в компьютер.
Мышь представляет собой небольшую пластмассовую коробочку с двумя или тремя кнопками, соединенную с компьютером тонким длинным кабелем.
Изобретена мышка была задолго до появления персонального компьютера. Еще в 1968 году чудаковатый гений Дуглас Энгельбарт впервые продемонстрировал публике… скажем так, бабушку всех сегодняшних мышей, походившую на большой утюг на двух деревянных колесиках. Естественно, выйти на рынок в таком виде мышь просто не могла. А потому изобретению Энгельбарта пришлось на десятилетие залечь в долгий ящик, и выйти на свет божий, уже в более совершенном и компактном обличье, только в конце 70-х, дабы стать достойным украшением только что родившегося компьютера Apple Macintosh. Именно на этом компьютере впервые появился полноценный графический интерфейс, где все команды пользователи отдавали с помощью щелчков по картинкам-пиктограммам на экране. IBM РС обзавелся этим удобством гораздо позже а потому и мышь появилась в его комплекте лишь к середине 80-х годов.
Еще в 1968 году чудаковатый гений Дуглас Энгельбарт впервые продемонстрировал публике… скажем так, бабушку всех сегодняшних мышей, походившую на большой утюг на двух деревянных колесиках. Естественно, выйти на рынок в таком виде мышь просто не могла. А потому изобретению Энгельбарта пришлось на десятилетие залечь в долгий ящик, и выйти на свет божий, уже в более совершенном и компактном обличье, только в конце 70-х, дабы стать достойным украшением только что родившегося компьютера Apple Macintosh. Именно на этом компьютере впервые появился полноценный графический интерфейс, где все команды пользователи отдавали с помощью щелчков по картинкам-пиктограммам на экране. IBM РС обзавелся этим удобством гораздо позже а потому и мышь появилась в его комплекте лишь к середине 80-х годов.
В программах, использующих мышь, на экране монитора отображается стрелка – указатель мыши, который перемещается по экрану одновременно с перемещением мыши по поверхности стола или коврика.
Мыши бывают с двумя или тремя кнопками. У некоторых мышей на месте третьей (средней) кнопки находится колесико, которое можно и прокручивать, и нажимать, как обычную кнопку. Третья кнопка раньше использовалась только небольшим количеством программ, но сейчас она широко используется в программах для редактирования текста и таблиц, при работе в сети Интернет. Часто при просмотре и редактировании текста на экране помещается только его часть, а с помощью третьей кнопки или колесика текст можно сдвинуть вверх или вниз, чтобы увидеть нужный фрагмент текста – это называется скроллингом или прокруткой.
У некоторых мышей на месте третьей (средней) кнопки находится колесико, которое можно и прокручивать, и нажимать, как обычную кнопку. Третья кнопка раньше использовалась только небольшим количеством программ, но сейчас она широко используется в программах для редактирования текста и таблиц, при работе в сети Интернет. Часто при просмотре и редактировании текста на экране помещается только его часть, а с помощью третьей кнопки или колесика текст можно сдвинуть вверх или вниз, чтобы увидеть нужный фрагмент текста – это называется скроллингом или прокруткой.
По конструктивному исполнению мыши бывают оптико-механические и оптические.
В оптико-механических манипуляторах мышь и трекбол основным рабочим органом является массивный шар (металлический, покрытый резиной). У мыши он вращается при перемещении ее корпуса по горизонтальной поверхности, а у трекбола вращается непосредственно рукой.
Вращение шара передается двум пластмассовым валам, положение которых с большой точностью считывается инфракрасными оптопарами (то есть парами «светоизлучатель-фотоприемник») и затем преобразуется в электрический сигнал, управляющий движением указателя мыши (курсора) на экране монитора.
Главным «врагом» мыши является загрязнение, а способом борьбы с ним – использование специального «мышиного» коврика.
В настоящее время широкое распространение получили оптические мыши, в которых нет механических частей. Источник света, размещенный внутри мыши, освещает поверхность, а отраженный свет фиксируется фотоприемником и преобразуется в перемещение курсора на экране.
Разрешающая способность мышей обычно составляет около 600 dpi (dot per inch — точек на дюйм). Это означает, что при перемещении мыши на 1 дюйм (1 дюйм = 2,54 см) указатель мыши на экране перемещается на 600 точек.
Современные модели мышей и трекболов часто являются беспроводными, то есть подключаются к компьютеру без помощи кабеля. В таких моделях для связи с компьютером вместо кабеля используются инфракрасные лучи.
Разъем для подключения мыши к компьютеру может быть двух видов: СОМ и PS/2. В последнее время наиболее популярны мыши с интерфейсом USB.
Программная поддержка. Драйвер мыши поставляется вместе с устройством. Современные операционные системы содержат драйверы для большинства манипуляторов этого типа и автоматически при включении компьютера подбирают наиболее подходящий из них.
Драйвер мыши поставляется вместе с устройством. Современные операционные системы содержат драйверы для большинства манипуляторов этого типа и автоматически при включении компьютера подбирают наиболее подходящий из них.
Устройства ввода информации в компьютер | Полезно знать
Компьютеру, как и человеку, необходимы свои «глаза и уши», с помощью которых он мог бы воспринимать информацию извне. В настоящее время имеются разнообразные устройства, выполняющие эти функции в составе компьютера. Они называются устройствами ввода, так как обеспечивают ввод в компьютер данных в различных формах: чисел, текстов, изображений, звуков.
Устройства ввода преобразуют эту информацию из формы, понятной человеку, в цифровую форму, воспринимаемую компьютером.
Современные компьютеры могут обрабатывать числовую, текстовую, графическую, звуковую и видеоинформацию.
Клавиатура — компьютерное устройство, которое располагается перед экраном дисплея и служит для набора текстов и управления компьютером с помощью клавиш, находящихся на клавиатуре.
Клавиатура позволяет вводить в компьютер числовую и текстовую информацию, а также различные команды и данные.
Микрофон используется для ввода звуковой информации, подключается к входу звуковой карты.
Сканер — устройство для перевода графической информации в цифровую.
Сканер используется для оптического ввода в компьютер и преобразования в компьютерную форму изображений (фотографий, рисунков, чертежей).
Сканеры используются и для бесклавиатурного ввода текста. Всякую информацию сканер воспринимает как графическую. Если это был текст, который в другом случае пришлось бы набирать вновь, то после работы сканера специальная программа распознавания текста, позволяющая выделить в считанном изображении отдельные символы и сопоставить им соответствующие коды символов, преобразовывает его в пригодный для обработки текст.
Веб-камера — малоразмерная цифровая видео или фотокамера, способная в реальном времени фиксировать видеоизображения, предназначенные для дальнейшей передачи по компьютерной сети.
Цифровые камеры позволяют получать видеоизображение и фотоснимки непосредственно в цифровом (компьютерном) формате. Позволяют вводить
в компьютер графическую информацию.
Сенсорный экран — устройство ввода информации
, представляющее собой экран, реагирующий на прикосновения к нему.
Графический планшет (дигитайзер). Графический планшет (со световым пером) — это устройство для ввода рисунков от руки и рукописного текста непосредственно в компьютер.
Графический планшет состоит из пера и плоского планшета, чувствительного к нажатию или близости пера. Дигитайзер — это ещё одно устройство ввода графической информации.
Специальные датчики, присоединяемые к компьютеру, позволяют измерять и вводить в его память такие числовые характеристики окружающей среды как температура, влажность, давление и многое другое.
Устройства речевого ввода. Средства речевого ввода позволяют пользователю вместо клавиатуры, мыши и других устройств использовать речевые команды (или проговаривать текст, который должен быть заранее занесен в память компьютера). Возможности таких устройств пока достаточно ограничены.
Возможности таких устройств пока достаточно ограничены.
Указательные(координатные) устройства ввода информации осуществляют непосредственный ввод информации, указывая курсором на экране монитора команду или место ввода данных. Данные устройства позволяют перемещать курсор или другие объекты соответствующих программ по двухмерному пространству экрана монитора с целью облегчения взаимодействия пользователя с компьютером при вводе информации.
Рассмотренные устройства ввода образуют группу устройств — манипуляторов.
Мышь. При её перемещении по коврику на экране перемещается указатель мыши, при помощи которого можно указывать на объекты и/или выбирать их.
Используя клавиши мыши, можно задать тот или иной тип операции с объектом.
Трекбол. По принципу действия трекбол (Track ball) лучше всего сравнить с мышкой, которая лежит на столе «брюшком» вверх.
Джойстик — устройство управления в компьютерных играх. Представляет собой рычаг на подставке, который можно отклонять в двух плоскостях.
Джойстик входит в необходимый игровой набор для компьютера, применяют его и в различных программах тренажёрах и обучающих симуляторах (наряду с виртуальными шлемами, рулями и т.п.).
Сенсорный экран — устройство ввода информации, представляющее собой экран, реагирующий на прикосновения к нему.
Тачпад служит для перемещения курсора в зависимости от движений пальца пользователя и используется для замены мыши в ноутбуках. Для перемещения курсора на весь экран достаточно небольшого перемещения пальца по поверхности тачпада.
Световое перо внешне имеет вид шариковой ручки или карандаша, соединённого проводом с одним из портов ввода-вывода компьютера.
Обычно на световом пере имеется одна или несколько кнопок, которые могут нажиматься рукой, удерживающей перо. Ввод данных с помощью светового пера заключается в прикосновениях или проведении линий пером по поверхности экрана монитора. В наконечнике пера устанавливается фотоэлемент, который регистрирует изменение яркости экрана в точке, с которой соприкасается перо, за счёт чего соответствующее программное обеспечение вычисляет позицию, «указываемую» пером на экране и может, в зависимости от необходимости, интерпретировать её тем или иным образом, обычно как указание на отображаемый на экране объект или как команду рисования.
1. Ввод звуковой информации — PDF Free Download
1 УКАЗАТЕЛЬНЫЕ УСТРОЙСТВА ВВОДА ИНФОРМАЦИИ Митин В.А, студент научный руководитель Абрамова О. Ф., доцент Волжский политехнический институт (филиал) ФГБОУ ВПО «Волгоградский государственный технический университет» Волжский, Россия Введение Сложно представить нашу жизнь без компьютера. В развитых странах, практически в каждой семье есть свой компьютер, зачастую не один. Во всех крупных корпорациях мира используются компьютеры для таких целей, как учет продукции, автоматическое управление производством, ценами на продукты и т.д. Такая популярность персональных компьютеров обусловлена доступностью и высокими возможностями. Еще пару десятилетий назад компьютеры не были так распространены по многим причинам: 1. Высокая стоимость. 2. Слабые на тот момент возможности для применения.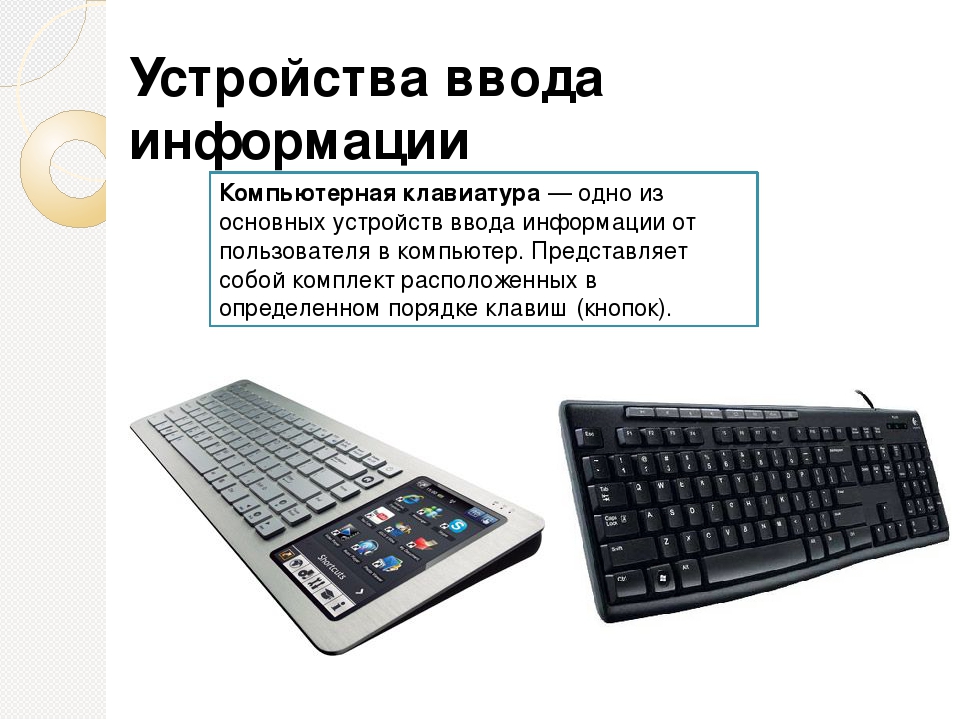 3. Огромные размеры. 4. Неудобное программирование и медленное выполнение программ. А так же отсутствия удобного интерфейса для связи компьютерпользователь. В наше время существуют устройства ввода-вывода предоставляющие удобное общение пользователя с компьютером. Сейчас уже не существует персональных (домашних) компьютеров неукомплектованных устройствами ввода. Благодаря этим решениям практически любой человек может общаться со своим компьютеров. Так как на каждый тип устройства ввода найдется множество решений, пользователи неограниченны одним-двумя устройствами, по этой же причине даже некоторые инвалиды могут пользоваться компьютером, пусть и специализированных устройств на рынке мало. Устройства ввода в свою очередь делятся на несколько типов: 1. Ввод звуковой информации 1
3. Огромные размеры. 4. Неудобное программирование и медленное выполнение программ. А так же отсутствия удобного интерфейса для связи компьютерпользователь. В наше время существуют устройства ввода-вывода предоставляющие удобное общение пользователя с компьютером. Сейчас уже не существует персональных (домашних) компьютеров неукомплектованных устройствами ввода. Благодаря этим решениям практически любой человек может общаться со своим компьютеров. Так как на каждый тип устройства ввода найдется множество решений, пользователи неограниченны одним-двумя устройствами, по этой же причине даже некоторые инвалиды могут пользоваться компьютером, пусть и специализированных устройств на рынке мало. Устройства ввода в свою очередь делятся на несколько типов: 1. Ввод звуковой информации 1
2 К ним относятся различные типы микрофонов. 2. Графической информации Сюда можно отнести такие устройства как сканеры, фотоаппараты, видео и веб-камеры и прочие. 3. Ввод текстовой информации К этому типу относятся различные виды клавиатур. 4. Координатные устройства ввода О них и пойдет речь в данной работе. Компьютерная мышь Когда и кто изобрёл первую компьютерную мышь? Дуглас Энгельбарт изобрел компьютерную мышь в начале 1960-х в своей исследовательской лаборатории в Стэнфордском исследовательском институте. Первый прототип был построен в 1964 году, рассматривался как «индикатор положения XY для системы отображения», был продан в 1967 году, и это изобретение было награждено в 1970 году. Хотя многие впечатляющие инновации для взаимодействия с компьютерами создавались следующие 50 лет с момента его изобретения, мышь остается и по сей день самым эффективным, доступным и распространённым ручным манипулятором. Первые мыши Основная идея для мыши сначала пришла к Дугласу в 1961 году. Он, сидя на конференц-сессии по компьютерной графике, обдумывал задачу творения интерактивных вычислений более эффективно. Ему пришло в голову, что, используя пару маленьких колес, контактирующих со столом, одно колесо поворота по горизонтали, другое поворота по вертикали, компьютер может отслеживать объединенные повороты и перемещения курсора на дисплее соответственно.
Ввод текстовой информации К этому типу относятся различные виды клавиатур. 4. Координатные устройства ввода О них и пойдет речь в данной работе. Компьютерная мышь Когда и кто изобрёл первую компьютерную мышь? Дуглас Энгельбарт изобрел компьютерную мышь в начале 1960-х в своей исследовательской лаборатории в Стэнфордском исследовательском институте. Первый прототип был построен в 1964 году, рассматривался как «индикатор положения XY для системы отображения», был продан в 1967 году, и это изобретение было награждено в 1970 году. Хотя многие впечатляющие инновации для взаимодействия с компьютерами создавались следующие 50 лет с момента его изобретения, мышь остается и по сей день самым эффективным, доступным и распространённым ручным манипулятором. Первые мыши Основная идея для мыши сначала пришла к Дугласу в 1961 году. Он, сидя на конференц-сессии по компьютерной графике, обдумывал задачу творения интерактивных вычислений более эффективно. Ему пришло в голову, что, используя пару маленьких колес, контактирующих со столом, одно колесо поворота по горизонтали, другое поворота по вертикали, компьютер может отслеживать объединенные повороты и перемещения курсора на дисплее соответственно. Колеса могут функционировать так же, как, например, колеса напланиметра (инструмента, используемого инженерами и географами для измерения области на карте, плане, чертеже и т.д.), — но в данном случае, прокат колеса по 2
Колеса могут функционировать так же, как, например, колеса напланиметра (инструмента, используемого инженерами и географами для измерения области на карте, плане, чертеже и т.д.), — но в данном случае, прокат колеса по 2
3 столу будет строить х, у координаты курсора на экране компьютера. Он записал идею в своей записной книжке для дальнейшего использования. Спустя чуть больше года, Энгельбарт получил долгожданный грант в Научно исследовательском институте запустить свою исследовательскую инициативу мечты под названием «увеличение Человеческого Разума», в которой он предполагал интеллектуальных работников, сидящих за высокопроизводительными интерактивными рабочими станциями отображения, в которых имеется доступ к обширному онлайн — информационному пространству, и они могли бы сотрудничать по важным проблемам. Он нанял небольшую исследовательскую группу и создал базовую лабораторию с компьютером и телетайпов (электромеханическая печатная машина, используемая для передачи между двумя абонентами текстовых сообщений), и, наконец, с дисплеем терминала. В настоящее время существует несколько решений для перемещения курсора и выбора чего — то на экране дисплея, но нет хороших данных о том, какие будут наиболее эффективны для удовлетворения требования Энгельбарта «высокопроизводительные». Он подал заявление и был награжден небольшой грантом от НАСА (национальное управление по воздухоплаванию и исследованию космического пространства), чтобы исследовать этот вопрос. Энгельбарт и его научные сотрудники собрали тогда лучшие в своем классе указательные устройства для сравнения, и соорудил несколько прототипов альтернативных мышей. Энгельбарт также рассмотрел свои прежние замечания со своим ведущим инженером Биллом Инглишем, который построил прототип портативного устройства с перпендикулярными колесами, установленными в резном из деревянного бруска блоке, и с кнопкой в верхней части. Это и была первая мышь. Свойства мыши 3
В настоящее время существует несколько решений для перемещения курсора и выбора чего — то на экране дисплея, но нет хороших данных о том, какие будут наиболее эффективны для удовлетворения требования Энгельбарта «высокопроизводительные». Он подал заявление и был награжден небольшой грантом от НАСА (национальное управление по воздухоплаванию и исследованию космического пространства), чтобы исследовать этот вопрос. Энгельбарт и его научные сотрудники собрали тогда лучшие в своем классе указательные устройства для сравнения, и соорудил несколько прототипов альтернативных мышей. Энгельбарт также рассмотрел свои прежние замечания со своим ведущим инженером Биллом Инглишем, который построил прототип портативного устройства с перпендикулярными колесами, установленными в резном из деревянного бруска блоке, и с кнопкой в верхней части. Это и была первая мышь. Свойства мыши 3
4 Мышь позволяет человеку управлять указателем в графическом интерфейсе пользователя и манипулировать на экране объектами, такими как иконки, файлы и папки. С помощью мыши пользователю не обязательно помнить все команды, которые используются в текстовой командной строке среды, такой как MS-DOS. Например, в MS-DOS пользователь должен знать, что с помощью команд CD и DIR можно перейти в папку и просмотреть файлы. Тем не менее, в ОС Windows пользователю достаточно только лишь дважды щелкнуть на папке, чтобы просмотреть все файлы. Как использовать мышь? У мыши есть 4 основные функции: 1.Перемещение правой или левой рукой тяните мышь вверх, вниз, влево или вправо, чтобы переместить указатель мыши на экране. Если вы достигнете края вашего коврика для мыши, поднять мышь, переместить её в противоположную сторону и опустить мышь, а затем продолжить перемещать мышь в нужном направлении. 2.Выделить — Когда указатель мыши находится на вершине объекта на экране (например, значок), нажмите на левую кнопку мыши один раз, чтобы выделить пункт. Если вы хотите выбрать текст, нажмите левую кнопку в конце текста, который хотите выделить, а затем, продолжая удерживать кнопку, перетащите мышь в другой конец текста, после чего отпустите кнопку.
С помощью мыши пользователю не обязательно помнить все команды, которые используются в текстовой командной строке среды, такой как MS-DOS. Например, в MS-DOS пользователь должен знать, что с помощью команд CD и DIR можно перейти в папку и просмотреть файлы. Тем не менее, в ОС Windows пользователю достаточно только лишь дважды щелкнуть на папке, чтобы просмотреть все файлы. Как использовать мышь? У мыши есть 4 основные функции: 1.Перемещение правой или левой рукой тяните мышь вверх, вниз, влево или вправо, чтобы переместить указатель мыши на экране. Если вы достигнете края вашего коврика для мыши, поднять мышь, переместить её в противоположную сторону и опустить мышь, а затем продолжить перемещать мышь в нужном направлении. 2.Выделить — Когда указатель мыши находится на вершине объекта на экране (например, значок), нажмите на левую кнопку мыши один раз, чтобы выделить пункт. Если вы хотите выбрать текст, нажмите левую кнопку в конце текста, который хотите выделить, а затем, продолжая удерживать кнопку, перетащите мышь в другой конец текста, после чего отпустите кнопку. 3.Открыть — Нажмите левую кнопку мыши два раза без паузы между нажатиями (двойной щелчок), чтобы открыть значок, программы или документа. 4.Просмотр свойств — Для просмотра каких-либо свойств на компьютере выберите объект или текст с помощью левой кнопки мыши, а затем нажмите правой кнопкой мыши и выберите свойства. Если вы просмотрите свойства 4
3.Открыть — Нажмите левую кнопку мыши два раза без паузы между нажатиями (двойной щелчок), чтобы открыть значок, программы или документа. 4.Просмотр свойств — Для просмотра каких-либо свойств на компьютере выберите объект или текст с помощью левой кнопки мыши, а затем нажмите правой кнопкой мыши и выберите свойства. Если вы просмотрите свойства 4
5 текста вы будете иметь дело с меню опций, такими как вырезать, копировать, вставить и т.д. Виды компьютерных мышей Беспроводные мыши Беспроводная мышь даёт возможность работы устройства без каких-либо проводов, которые могут вызвать неудобство. Такие устройства обычно используют ИК-порт, Bluetooth или Wi-Fi сети, которые используют один из беспроводных стандартов для беспроводной связи (IEEE ). Хотя беспроводные устройства не требует никаких проводов, они требуют некоторого устройства для передачи сигнала; например, Bluetooth- мышь может потребовать USB Bluetooth приемопередатчик для передачи и приема сигналов от мыши. В дополнение к этому, все беспроводные аппаратные устройства требует батарею. Компьютерные мыши для ног Данное устройство является одним из видов компьютерной мыши, что позволяет пользователю управлять курсором мыши при помощи ног. Идея этой технологии состоит в том, чтобы позволить пользователю использовать клавиатуру двумя руками и одновременно управлять мышью. J мыши J-Маус используется со старыми портативными компьютерами, используемых клавишу «J» на клавиатуре и обычно две отдельные клавиши для левой и правой кнопки мыши под клавишей пробела. Из-за своей сложности в использовании и лучших технологий, которые впоследствии были введены, эта мышь больше не используется. Механические мыши Шарик с резиновым покрытием в шариковой мышке, перемещаясь по рабочей поверхности(столу, коврику для мыши), вращает 2 ролика отвечающие за распознавание перемещения по двум осям — вертикальной и горизонтальной. Информация с этих 2 роликов, впоследствии будет перекодирована в понятный 5
В дополнение к этому, все беспроводные аппаратные устройства требует батарею. Компьютерные мыши для ног Данное устройство является одним из видов компьютерной мыши, что позволяет пользователю управлять курсором мыши при помощи ног. Идея этой технологии состоит в том, чтобы позволить пользователю использовать клавиатуру двумя руками и одновременно управлять мышью. J мыши J-Маус используется со старыми портативными компьютерами, используемых клавишу «J» на клавиатуре и обычно две отдельные клавиши для левой и правой кнопки мыши под клавишей пробела. Из-за своей сложности в использовании и лучших технологий, которые впоследствии были введены, эта мышь больше не используется. Механические мыши Шарик с резиновым покрытием в шариковой мышке, перемещаясь по рабочей поверхности(столу, коврику для мыши), вращает 2 ролика отвечающие за распознавание перемещения по двум осям — вертикальной и горизонтальной. Информация с этих 2 роликов, впоследствии будет перекодирована в понятный 5
6 для компьютера цифровой код. Такие мыши нуждаются в частой чистке: шарик собирает пыль и мусор с любой поверхности. Эта грязь передаётся на ролики внутри, что затрудняет движение шарика или перемещение курсора по экрану будет неточным. Оптические мыши Данное устройство для отслеживания движения мыши использует светоизлучающий диод или лазер. Кроме них оптическая мышь так же имеет камеру, с крошечным разрешением, которая делает более тысячи снимков в секунду. В камере комплементарный металлооксидный полупроводник посылает сигнал в процессор цифровых сигналов, который может анализировать каждое изображение для общей картины и легких изменений, после чего перемещает курсор мыши на экране. Индукционные мыши Для работы индукционных мышей требуется специальный коврик, который работает по принципу графического планшета. Устройства имеют высокую точность и их не обязательно правильно ориентировать. Так же есть беспроводные индукционные мыши. Индукционное зарядное устройство подключается к USB разъёму и выполняет роль коврика.
Такие мыши нуждаются в частой чистке: шарик собирает пыль и мусор с любой поверхности. Эта грязь передаётся на ролики внутри, что затрудняет движение шарика или перемещение курсора по экрану будет неточным. Оптические мыши Данное устройство для отслеживания движения мыши использует светоизлучающий диод или лазер. Кроме них оптическая мышь так же имеет камеру, с крошечным разрешением, которая делает более тысячи снимков в секунду. В камере комплементарный металлооксидный полупроводник посылает сигнал в процессор цифровых сигналов, который может анализировать каждое изображение для общей картины и легких изменений, после чего перемещает курсор мыши на экране. Индукционные мыши Для работы индукционных мышей требуется специальный коврик, который работает по принципу графического планшета. Устройства имеют высокую точность и их не обязательно правильно ориентировать. Так же есть беспроводные индукционные мыши. Индукционное зарядное устройство подключается к USB разъёму и выполняет роль коврика. Пока мышь находится на коврике, она заряжается. Сенсорная мышь Сенсорная мышь напоминает обычную оптическую мышь. Стандартные левая и правая кнопка объединены в единую площадку. С помощью этого устройства можно использовать жесты для управления операционной системой. Для жестов выделена специальная область, на которую нанесены узоры. Жесты: движение одним пальцем влево или вправо осуществляет пролистывание, ведём два пальца вверх и открывается активное окно, а обратный жест уберёт его с экрана, движениями влево и вправо можно раскидать окна по рабочему столу, с левой стороны области жестов с помощью 6
Пока мышь находится на коврике, она заряжается. Сенсорная мышь Сенсорная мышь напоминает обычную оптическую мышь. Стандартные левая и правая кнопка объединены в единую площадку. С помощью этого устройства можно использовать жесты для управления операционной системой. Для жестов выделена специальная область, на которую нанесены узоры. Жесты: движение одним пальцем влево или вправо осуществляет пролистывание, ведём два пальца вверх и открывается активное окно, а обратный жест уберёт его с экрана, движениями влево и вправо можно раскидать окна по рабочему столу, с левой стороны области жестов с помощью 6
7 большого пальца можно листать картинки в галерее, или переходить между web — страницами. Максимальное количество точек соприкосновения 3. Гироскопические(воздушные) мыши Воздушная мышь является идеальным дополнением к вашему домашнему кинотеатру, ПК или проекторному экрану. Его простая настройка программного обеспечения и интерфейс делает мышь доступной любому новому устройству управления движением. В воздухе мышь имеет уникальный форм-фактор, предназначенный для более удобной обработки движения. Его тонкую структуру может чувствовать неловко люди, с большими ладонями. Верхняя часть мыши представляет собой глянцевый черный пластик, который, несомненно, быстро покрывается пятнами. Между кнопок мыши имеется колесо прокрутки, под ним есть три настраиваемые кнопки. Нижняя сторона мыши является триггером, как кнопка, предназначенная для активации обнаружения движения. Air Mouse совместима с Mac и Windows. Air Mouse поставляется с ключом USB для 2,4-ГГц для беспроводной связи, которая может передавать до 100 футов, — идеально подходит для лекционных залов. 3D мыши 3D мышь представляет собой устройство ввода, которое позволяет перемещать 3D объекты более простым и интуитивно понятным способом. Причиной этому является то, что 3D контроллер обеспечивает доступ к трём измерениям управления движением: 1. вправо и влево 2. вперёд и назад 3. вверх и вниз. Кроме того 3D контроллер позволяет вращать объект вокруг своей оси 3D контроллер. Такие устройства идеально подходят для ввода для САПР строительства, а также для движения камеры в GoogleEarthTM. Сердцем устройства является его поворачиваемое колесо на верхней панели. Его можно вращать или перемещать и объект будет двигаться в том же направлении. Как только вы отпустите колесо, оно вернётся в своё первоначальное положение, а 7
8 объект на экране остановит своё движение. С координатными мышами типа ХY(2D) можно контролировать объекты при движении только в одном направлении, в то время как с 3D манипулятором все движения объединяются и позволяют значительно оптимизировать рабочий процесс. При работе с 3D вы так же можете использовать 2D мышь. В сочетании оба устройства ввода делают то, для чего они предназначены: с помощью 3D мыши вы контролируете и перемещаете объекты, а с помощью 2D мыши вы работаете с объектами. Таким образом, работая двумя мышами сразу, вы используете время более эффективно. Поскольку часть работы делает 3D мышь, а часть 2D, переутомление правой руки снижается, и процесс строительства становится более эргономичным. ErgoMotion ErgoMotion является одной из разновидностей мыши, разработанной для облегчения нагрузки на руку пользователя. На вид мышь напоминает обычную оптическую мышь. Данная мышь имеет подставку, с помощью которой и упрощается управление. Подставка представляет собой невысокий конус, в основание которого имеет площадь, превышающую размеры мыши. На вершине этого конуса расположен шар, а в мышее специальная ямка, под этот шар. Достаточно наклонить мышь, и курсор на экране будет двигаться в том же направлении. Mouse glove Еще одной альтернативой обычной компьютерной мыши является mouse glove, что означает мышь-перчатка. Особенностью этих устройств является способ управления, для этого устройства не требуется рабочая поверхность, все движения можно выполнять в воздухе. Достигается это за счет использования акселерометра, по типу того, которые используются в современных смартфонах. Данный вид устройств не получил широкого распространения из-за малого количества удобных решений. Однако на рынке все же присутствуют несколько решений от разных компаний. Одним из таких решений является Air Mouse Glove от компании Ion Wireless. Данная мышь-перчатка была представлена в 2012 году, ее стоимость со- 8
9 ставляет 80$. Данное устройство представляет собой перчатку с пластиковым модулем в верхней части. Air Mouse Glove подключается к компьютеру посредством Wi-Fi, с помощью небольшого передатчика USB 2.0. На указательном пальце находится небольшой блок с тремя кнопками. Одна имитирует нажатие левой кнопки мыши, вторая правой, третья кнопка временного выключения. На блоке в верхней части устройства имеется кнопка включения/выключения, а так же разъем USB для зарядки мыши. Там же находится светодиод, показывающий степень зарядки устройства: красный разряжено, желтый заряжается, зеленый заряжен. Однако такое устройство имеет свои недостатки, для правильной работы устройства требуется держать руку навесу, к этим недостаткам можно добавить непривычное расположение кнопок, поэтому при печатании на клавиатуре двумя руками вы будете задевать кнопки активирующие нажатия мыши. Частично данный недостаток компенсируется возможностью временного выключения. Принимая во внимание довольно большую цену данного устройства, такая мышь не будет интересна для обычного пользователя, однако учитывая специфику управления устройством, такая мышь-перчатка вполне может заменить обычную мышь для людей больных туннельным синдромом. Учитывая небольшую популярность и недоработку решений от крупных компаний, несколько распространены самодельные устройства. Например, один русский энтузиаст создал устройство Mouse Track. В качестве аппаратной платформы был взят Arduino. Перемещение мыши происходит через отслеживание светодиода установленного в перчатку и веб-камеры. Для «перевода» движений с веб-камеры в движение курсора используется свободнораспространяемое программное обеспечение FreeTrack. Нажатие мыши определяется с помощью кнопок на пальцах, либо встроенного в устройство акселерометра, который подает определенный сигнал в зависимости от наклона перчатки в аппаратную часть, которая в свою очередь с помощью собственнонаписанного программного обеспечения отправляет информацию на компьютер посредством COM порта. Нажатие кнопок на пальцах реализовано с помо- 9
10 щью провода присоединенного к кнопке. Палец сгибается, тянет данный провод припаянный к нажиму кнопки. Возможно, когда-нибудь эти устройства заменят обычную компьютерную мышь, однако учитывая большое кол-во существующих условностей в использовании данных устройств, а так же из-за отсутствия необходимости, либо сфер использования, эти мыши еще не скоро станут востребованы и достаточно доработаны. Другие координатные устройства ввода Световое перо Световое перо — координатное устройство ввода информации, внешне напоминающее перо. В наконечнике пера содержится светочувствительный элемент, реагирующий на световой сигнал, который передается экраном в точке прикосновения. Положение светового пера на экране определяется сопоставлением времени появления сигнала с сигналом развертки изображения монитора. Световое перо не требует специального покрытия или экрана, однако оно не работает с LCD мониторами. Световое перо это полуавтоматическое устройство, названное пером условно, так как оно не оказывает никого влияние на экран, а наоборот считывает информацию с него. Световое перо состоит из цилиндрического корпуса и светочувствительного элемента, который получает свет от линзы, закрепленной на заостренном конце пера. Для того, чтобы исключить реакцию на окружающее освещение, перо включается только при касании его к экрану. Сильной стороной этого устройства является эргономичность, так как его удобно использовать вместо мыши, особенно если требуется работать с графика, рисунками и т.п. Джойстик Джойстик координатное устройство ввода, как дискретное, так и аналоговое. Представляет собой движущуюся в двух плоскостях вертикальную ручку. В основном джойстик используют для управления каким-либо объектом в трех плоскостях(x, Y, Z), в основном управление виртуальным самолетом. Помимо возможности распознавания движение по двум осям X и Y, в некоторых 10
11 джойстиках предусмотрена ось Z, которая меняется посредством вращения ручки джойстика. Джойстики различаются по кол-ву степеней свободы: Одномерные, двумерные и трехмерные. Также джойстиками часто ошибочно называют игровые геймпады. По принципу определения движения ручки джойстики можно разделит на два типа: 1. Дискретные могут принимать только два значения: 0 и 1. Т.е. только максимальное положение и центральное. Устаревший вид джойстиков, который, однако, используется в некоторых игровых автоматах и мобильных телефонах. 2. Аналоговые такой тип джойстиков обычно использует два реостатных датчика позволяющие определять степень наклона рукоятки и координату соответственно. Точность зависит от разрешения приемных сенсоров. Существуют несколько видов джойстиков по типу использующихся датчиков: 1. Потенциометр дешев в производстве и не требователен к дополнительным элементам механики, однако такой датчик недолговечен и требователен к питанию. 2. Энкодер оптический датчик, обычно использующийся в компьютерных мышах. Довольно точен и долговечен, однако за счет своей конструкции имеет малое кол-во шагов дискретности, а для увеличения их кол-ва требуются дорогостоящие и более совершенные энкодеры, либо редукторы. 3. Тензометрические датчики точные, однако слабо распространенные в связи с требованием точного и крепкого крепления к поверхности. 4. Оптическая матрица использует тот же принцип, что и в оптических мышах. Преимущества и недостатки сходны с Энкодером. 11
12 5. Магнитные датчики очень точны и надежны, однако из-за огрех в производстве начали набирать свою популярность относительно недавно, когда стали использоваться схемы компенсации огрех на производстве. Самый предпочтительный вид джойстика. Исторически сложилось так, что долгое время джойстики, как и большинство других игровых устройств не имели унифицированного разъема подключения. В настоящее время все джойстики подключаются посредством порта USB. Джойстики, как и большинство других игровых устройств, часто оснащаются дополнительными элементами управления: мини-джойстики, различные ползунки и кнопки. Сенсорная панель Сенсорная панель, так же известная как трекпад, тачпад, площадка скольжения, является достаточно распространённым устройством ввода, встречается на большинстве портативных компьютеров, и доступно в сочетании с внешней клавиатурой, что позволит перемещать курсор без помощи внешней мыши. Достаточно провести по сенсору пальцем, курсор на экране повторит движение его движение. Так же сенсорная панель имеет две клавиши ниже сенсорной поверхности, которые используются как на обычной мыши. Графический планшет Графический планшет(или дигитайзер) плоский планшет с чувствительной площадкой и чувствительное перо. Перо обычно имеет две программируемые кнопки на корпусе. Особенностью графических планшетов является возможность распознавания движение в см от поверхности планшета. Это свойство дает определенные преимущества, однако может показаться неудобным. Это устройство обычно используют для рисования, для этого можно регулировать lpi, благодаря чему, можно например, выставить малый lpi и рисовать быстро, но неточно, и наоборот, выставив большой lpi можно с высокой точностью управлять указателем. В современных планшетах используется сеть из проводов, имеющих шаг 3-6мм, однако механизм регистрации положения, позволяет уменьшить этот 12
13 шаг примерно до 200 линий на мм. По принципу работы современные планшеты разделяются на две категории: электростатические и электромагнитные. Первые регистрируют изменение электрического потенциала сетки под пером, вторые в качестве приемника используют сетку, а перо излучает электромагнитные волны. В обоих случаях перу требуется питание. Однако фирма Wacom создала технологию, где сетка не только принимает, но и отправляет сигнал. Этот сигнал в свою очередь используется не только для определения местоположения пера, но и для его питания, что облегчает конструкцию самого пера. Оно в свою очередь отправляет заново сформированный сигнал, который обычно содержит дополнительную информацию, например, идентифицирует себя или данные о силе нажатия (некоторые устройства распознают такие нажатия), или о том используется ли рабочий конец пера или его ластик. Однако у такого удобного устройства от Wacom есть и недостаток возможны помехи от излучающих устройств, в частности мониторов. В некоторых современных графических планшетах, кроме определения координат и состояния нажатия пером на планшет, также может регистрироваться давление пера на планшет, направление поворота в плоскости, его наклон и даже степень сжатия пера рукой. Иногда в комплекте с пером и планшетом, также поставляется мышь, которая, однако, работает по тому же принципу, что и перо из-за чего может работать только на поверхности планшета. Может показаться, что использовать такую мышь неудобно, однако при достаточном размере планшета у такой мыши появляется преимущество благодаря большему, чем у мыши разрешению (lpi), работа с такой мышью позволяет достичь высокой точности передвижения указателя. На рынке имеются более продвинутые и дорогие версии графических планшетов с жидкокристаллическим экраном использующие активноматричный дисплей на пленочных транзисторах. Благодаря возможности выводит картинку на такой планшет, повышается удобность работы с рисунком. До недавнего времени графические планшеты были слабо распространены из-за малого круга применения и цены, однако в последнее время они ста- 13
14 новятся все более популярными, благодаря тому, что эти устройства становятся все более удобными и доступными на рынке. В дополнение к этому расширяется круг применения устройства, например некоторые службы IM (обмена мгновенными сообщениями) позволяют пользователям графических планшетов напрямую демонстрировать действия своему собеседнику. Трекбол Трекбол это указательное устройство ввода, которое выглядит как перевёрнутая шариковая мышь. Это устройство широко известно как одно из самых удобных и точных альтернатив мыши. Трекболы различаются размером шара и расположением кнопок. Шар можно вращать пальцем или ладонью. До появления Сенсорных панелей небольшие трекболы широко использовались в телефонах и нетбуках, поскольку с данными устройствами внешнюю мышь использовать достаточно неудобно. Трекбол почти не требует пространства, т.к его корпус не задействован в управлении, и находится в неподвижном состоянии. Такие мыши нуждаются в частой чистке: шарик переносит масло с ваших рук внутрь устройства, оно попадает на ролики, внутри мыши и уменьшает точность передачи сигнала. Трекпоинт Трекпоинт это тензометрический джойстик небольших размеров, так же известный как PointStick, Track Stick, StickPoint, Бородавка, который напоминает ластик на карандаше, расположенный между клавишами «G», «H» и » B» на клавиатуре. Для перемещения курсора на экране нажмите его и наклоните к себе или от себя или из стороны в сторону. Он не занимает никакой рабочей области, т.к находится прямо на клавиатуре, а так же требует минимального движения руки. Используется в качестве указательного устройства. Движение джойстика повторит на экране движениями курсора и других визуальных изменений. Кинект камера Kinect (изначально Project Natal) бесконтактный сенсорный игровой контроллер, позволяющий управлять чем-либо без помощи джойстика или мы- 14
15 ши. Разработан корпорацией Microsoft. 1 июня 2009 был представлен для консоли игровой консоли Xbox 360. Для персональных компьютеров под управлением ОС Windows поступил в продажу 1 февраля 2012 года. Kinect имеет горизонтально-ориентированный корпус, который обычно устанавливается на или под экран телевизора. Система имеет цветную видеокамеру, два сенсора глубины и микрофонной сетки, состоящей из 4 микрофонов. Такая реализация микрофонов позволяет определять говорящего. Kinect отправляет на консоль либо PC RBG потоковое видео с частотой 30 кадров в секунду и разрешением 640х480 пикселей. Такого же разрешения монохромный видеопоток, следящий за глубиной изображения. И, в завершение, 16-битное аудио с частотой дискретизации 16 кгц. Для отслеживания движений используется та же технология, как в дальномерах. Датчики глубины состоят из монохромной CMOS-камеры, объединенной с инфракрасным проектором, что позволяет Kinect получать трёхмерное изображение при любом освещении. Программа и возможности датчика глубины позволяют ему автоматически подстраиваться под движения владельца, и обстановку комнаты. В подставке Kinect установлен бесшумный сервопривод, поворачивающийся вслед за вашими перемещениями. Компания Microsoft зарегистрировала патент, судя по которому Kinect имеет возможность распознавать язык жестов. Ожидается, что будут созданы программы, помогающие немым изучать язык жестов. Консоль нового поколения Xbox One поставляется с обновленной версией Kinect Kinect 2. В обновленной версии были увеличены углы обзора, разрешения камеры, благодаря которому Kinect может отслеживать такие маленькие движения, как кисть ребенка на расстоянии 3 метров. Одновременное кол-во отслеживаемых людей было увеличено с 2 до 6. Leap Motion 15
16 Это устройство на самом деле довольно скромное, с учетом своих возможностей. Оно чуть более трех дюймов в длину, в ширину дюйм и менее половины дюйма толщиной (79 х 30 х 11 мм), с глянцевой черной панелью сверху, за которой проживает инфракрасные датчики. На дне, вы найдете черную резиновую панель с логотипом Leap Motion. По краю расположена алюминиевая бесшовная лента, на которой с левой стороны расположен порт USB 3.0. Светодиодный индикатор питания / состояния находится на передней панели. Leap Motion отличается от Kinect в более, чем просто в размере и по внешнему виду. Данное устройство работает с помощью инфракрасной оптики и камеры вместо датчиков глубины, и не распространяется на нем большую область, как жестом контроллера Microsoft. Leap отслеживает движения в точности, несравнимой с любой камерой, существующей в настоящее время: он может отслеживать все 10 ваших пальцев одновременно с точностью до сотых долей миллиметра с задержкой чуть более низкой, чем частота обновления на вашем мониторе. Настройка Leap является прямым делом. Просто подключите один конец в ноутбук или ПК, а другой в контроллер и установите его в таком месте, где он может увидеть ваши руки. После того, как вы его подключите, вы увидите, как загорятся зеленый светодиод на передней панели устройства и инфракрасные светодиоды на верхней. После чего нужно загрузить соответствующее программное обеспечение для Windows или Mac: Leap Motion люкс (пользователю будет предложено автоматически сделать это при подключении устройства). Контроллер Leap Motion имеет большой потенциал, чем какое-либо другое устройство ввода. В то время как это обеспечивает новые средства для вычислительного контроля в отличие от чего — либо еще, его всё равно недостаточно, чтобы заменить сенсорный экран или мышь в качестве основного устройства ввода. Управление Компьютером с помощью глаз Люди взаимодействуют с компьютером очень длительное время. Хотя большинство взаимодействий осуществляется с клавиатуры и мыши, как с по- 16
17 мощью рук, некоторые люди страдают от перенапряжения отдельных частей руки, как правило, вызывает синдром запястного канала. Прогресс не стоит на месте и техника совершенствуется, со временем количество взаимодействий с компьютерами возрастёт и нам нужны новые методы взаимодействия, которые не вызывают физические проблемы. Глаза хороший кандидат, потому что они двигаются в любом случае при взаимодействии с компьютерами. Данное устройство измеряет положение и движения глаз. В нём присутствует система слежения за движениями головы и измерения направления нашего зрения. Отслеживание взгляда представляет собой систему, которая распознаёт, где и что мы ищем глазами на экране. В отслеживании взгляда отмечают фиксированную позицию роговицы. Система отслеживания движений головы Система отслеживания движений головы это устройство, заменяющее повседневную компьютерную мышь, оно способно преобразовать движения головы в координаты. Способ применения очень прост: на голове пользователя крепится маркер. Расположение маркера может быть разным, в зависимости от среды применения. Он может крепиться на лоб, к наушникам и т.д. Вместе с движением головы пользователя движется и маркер, что отслеживается неподвижным датчиком. Существует довольно много устройств, с разными способами отслеживания: ультразвуковое, оптическое, с помощью лазера или электромагнитное. Существует два вида маркеров: активный и пассивный. В активном маркере присутствует излучатель, а в пассивном его нет, он лишь отражает видимый или инфракрасный свет. Так же существует обратная система с закрепленным на голове приёмником и неподвижными маркерами. Существуют программы, которые обычную web — камеру преобразуют в камеру отслеживания движений головы. Программа способна работать даже без светоотражающих маркеров, но в этом случае фиксация может быть недостаточно точна. 17
18 Примерами таких программ являются: Enable Viacam, FaceTrackNoIR, Cam2Pan,Free Track. Заключение Сегодня на рынке представлено огромное кол-во устройств ввода различной направленности. Некоторые из них являются экспериментальными разработками, непродающиеся в обычных магазинах, некоторые вполне привычными для нас устройствами, по типу мышей, джойстиков, графических планшетов и прочего. По этой причине невозможно в одной работе написать про все координатные устройства, так как по многим из незаконченных разработок, которые, несомненно, стоят внимания, имеется недостаточное кол-во информации для их описания. В последнее время появляется все больше интересных разработок в сфере устройств ввода-вывода, так как повышается потребность широкого круга пользователей в новых решениях. В свою очередь, как у крупных компаний, так и у различных энтузиастов появляется все больше возможностей реализовать свои мысли, идеи в качестве принципиально новых устройств. В связи с бурным развитием информационной сферы, можно с уверенностью сказать, что через какое-то время, возможно через всего десять лет, привычные для нас устройства сменятся довольно необычными, на наш сегодняшний взгляд, устройствами. В последнее время набирают обороты бесконтактные (беспроводные) устройства, которые решают многие проблемы в удобности использование таких устройств. Но у таких устройств есть свои недостатки, в частности требование к зарядке батареи. Однако уже появляются некоторые экспериментальные устройства, не относящиеся к компьютерным интерфейсам, реализующие беспроводную зарядку по воздуху. Если эта система будет внедрена в широкий круг устройств, то повсеместно будут использоваться только беспроводные решения. Список использованных источников 18
19 1. Семакин И. Г., Хеннер Е.К Информатика и ИКТ. Базовый уровень: учебник для М.: БИНОМ, с. 2. Могилев А.В., Пак Н.И., Хеннер Е.К. Практикум по информатике: учеб. пособие. М.: Издательский центр «Академия», с. 3. Kinect Will Recognise Sign Language: электрон. журн URL: 4. Будущее интерфейсов: электрон. журн URL: 5. Google Glass: сайт производителя. URL: 6. LeapMotion: cайт производителя. URL: 7. Wikipedia: URL: 19
1.2 Устройства ввода. Периферийные устройства компьютера
Похожие главы из других работ:
Автоматизированное рабочее место инспектора отдела кадров ТОО «Восточный экспресс»
1.4.6 Устройства ввода-вывода
К этой категории относятся внешние устройства, предназначенные для связи человека с машиной. Клавиатура Клавиатура IBM PC предназначена для ввода в компьютер информации от пользователя…
Архитектура и основные характеристики персонального компьютера
5.1 Устройства ввода данных
Кроме клавиатуры и мыши к этим устройствам относятся устройства ввода команд, текстовых и графических данных. К числу устройств ввода команд относятся джойстики и аналогичные ему джойпады, геймпады, штурвальные устройства…
Внутренние и периферийные устройства ПК
2.1. Устройства ввода
Клавиатура. За время, прошедшее с выпуска первого РС, фирма IBM разработала 3 типа клавиатур (рис. 2-1): — 83-клавишная клавиатура РС ХТ; — 84-клавишная клавиатура АТ; — 101-клавишная улучшенная клавиатура…
Входные устройства ЭВМ и их характеристики
4. Устройства ввода графической информации
…
Входные устройства ЭВМ и их характеристики
Другие устройства ввода
1. Сканер 2. Цифровой фотоаппарат 3. Дигитайзер 4. Сенсорное перо Микрофон 1. Мышь 2. Трекбол 3. Тачпад 4. Джойстик 5. Сенсорное перо Клавиатура 3. Указательные (координатные) устройства 3.1 Джойстик Джойстик — устройство ввода информации…
Входные устройства ЭВМ и их характеристики
6. Другие устройства ввода
Клавиатура — комплект расположенных в определенном порядке клавиш для управления каким-либо устройством или для ввода данных Клавиши компьютерной клавиатуры Стандартная компьютерная клавиатура обычно имеет 102 клавиши…
Выполнение ввода и вывода информации с носителей. Работа с клавиатурой
1. Устройства ввода/вывода
1.1 Основные типы устройств ввода/вывода Как правило периферийные устройства компьютеров делятся на устройства ввода, устройства вывода и внешние запоминающие устройства (осуществляющие как ввод данных в машину…
Информационные технологии в дизайне
УСТРОЙСТВА ДЛЯ ВВОДА ЛЕКАЛ
Дигитайзеры предназначены для ввода контура лекал в систему проектирования. Ввод лекала заключается в обведении контура лекала, закрепленного на доске, специальным карандашом. Разновидностью дигитайзеров являются фотодигитайзеры…
Основные компоненты ЭВМ. Идеи и основы сети Интернет
2. Устройства ввода-вывода
Компьютер обменивается информацией с внешним миром с помощью периферийных устройств. Только благодаря периферийным устройствам человек может взаимодействовать с компьютером, а также со всеми подключенными к нему устройствами…
Особенности изучения архитектуры ЭВМ
1.5 Устройства ввода и вывода
Основные устройства — клавиатура, манипулятор «мышь» и сканер. Клавиатура используется для ввода текстовой информации и управления работой программ. Стандартная клавиатура для машин фирмы имеет 102 клавиши…
Периферийные устройства ввода и вывода информации
Сенсорные устройства ввода
Такие устройства называют ещё тактильными, поскольку ввод информации в них выполняется через прикосновение к светочувствительной поверхности устройства…
Периферийные устройства ввода и вывода информации
Другие устройства ввода
Парк периферийных устройств очень разнообразен и непрерывно расширяется по мере развития вычислительной техники. Цифровая видеокамера Устройство ввода, передающее динамическое видеоизображение в компьютер в реальном масштабе времени…
Периферийные устройства компьютера
1.2 Устройства ввода
Устройства ввода — аппаратные средства для преобразования информации из формы, понятной человеку, в форму, воспринимаемую компьютером. Рис.1. Классификация устройств ввода Устройства с клавиатурным вводом. Клавиатура…
Современные внешние устройства
Устройства ввода данных
…
Устройство компьютера
3.2 Устройства ввода информации
…
Глоссарий терминов по робототехнике | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея
Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в подвесном окне программирования, и может быть подтверждено текущее значение робота. Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея.Если функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность
Точность — это измерение отклонения между командной характеристикой и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не постоянна по всему рабочему пространству из-за влияния кинематики звена.
Робот с активным соответствием
Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическая позиция
Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии связи и т. Д.
Привод
Силовой механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию, чтобы вызвать движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо
Взаимосвязанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и руку или рабочий орган в пространстве. Сама рука не имеет рабочего органа.
См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор
Манипулятор с рукой, которая разделена на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение
Описывает сочлененное устройство, например сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу достигать ограниченного пространства.
Сборочный робот
Робот, специально разработанный для соединения, подгонки или иным способом сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и соединения или подгонки их друг к другу, например, при производстве на сборочных линиях.
Функция автоматического измерения
Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим
См. Режим воспроизведения.
ось
Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Вмешательство оси
Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах заранее определенного диапазона.
База
Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую опорную точку для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка
Стационарная базовая конструкция манипулятора робота, поддерживающая первый сустав.
Приработка
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Компьютерное проектирование (CAD)
Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для разработки схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты
Декартовы координаты — это тип системы координат, которая определяет положение точки в двухмерном пространстве с помощью пары числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка задана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор
Декартов манипулятор — это манипулятор с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология
Топология, в которой используются призматические стыки, обычно расположенные перпендикулярно друг другу.
Робот с декартовыми координатами
Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Это описывает движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3)
Категория 3 (категория 3) означает, что элементы системы управления, связанные с безопасностью, будут спроектированы таким образом, чтобы:
Единичные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от той, которая находится в центре его масс, оно оказывает внешнюю радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой тангенциальной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Тип кругового перемещения
Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим
Конечный эффектор, который служит пневматической рукой, которая контролирует захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим
Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима
При контакте может быть зажат части тела (частей).
Замкнутый
Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Обратную связь.
Робот для совместной работы
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Интерпретатор команд
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция
Конечная точка движения робота, которую пытается достичь контроллер.
Соответствие
Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. При стрессе низкая комплаенс будет жесткой системой.
Робот, соответствующий требованиям
Робот, который выполняет задачи по отношению к внешним силам, изменяя свои движения таким образом, чтобы эти силы сводились к минимуму. Указанное или разрешенное движение достигается за счет поперечной (горизонтальной), осевой (вертикальной) или вращательной податливости.
Конфигурация
Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.
Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь
Описывает процесс, в котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «От точки к точке».
Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления
Команда, подаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления
Любая часть управляющего оборудования, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления
Средства, с помощью которых инструкции передаются роботу.
Управляемость
Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Контроллерная система
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рамка
Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех
Эта область представляет собой прямоугольный параллелепипед, который параллелен базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение TCP манипулятора внутри или за пределами этой области, и выводит это состояние в качестве сигнала.
Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикло-привод
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси.
Цилиндрическая топология
Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не популярен в промышленности.
Выключатель аварийного отключения
Устаревший срок. См. Включение устройства.
степеней свободы
Количество независимых направлений или суставов робота (R15.07), которые позволяют роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод
Совместное срабатывание, в том числе без элементов трансмиссии (т. Е. Тяга привинчена к выходу двигателя).
Время простоя
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время безотказной работы.
Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка
Метод подвода предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой или отсутствующей транспортировкой робота.
Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения
См. Включение устройства.
Разрешающее устройство
Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Кодировщик
Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
EOAT
См. Захват или Концевой эффектор.
Рабочий орган
Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструмента, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка
Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка
Разница между фактическим ответом робота и отданной командой.
Возможность расширения
Возможность добавлять в систему ресурсы, такие как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешнего усилия
Пороговое значение, при котором робот перемещается или сохраняет положение даже при приложении внешних сил (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором.
См. Раздел «Управление обратной связью» и «Датчик обратной связи».
Управление с обратной связью
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается контроллеру робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
Датчик обратной связи
Механизм, через который информация от сенсорных устройств возвращается в блок управления роботом. Информация используется в последующем направлении движения робота. См. «Управление с обратной связью и управление с обратной связью».
Гибкость
Способность робота выполнять самые разные задачи.
Силовая обратная связь
Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. Раздел «Обратная связь», «Датчик обратной связи» и «Датчик силы».
Датчик силы
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
Решение для прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений шарниров.Для большинства топологий роботов это проще, чем найти решение с обратной кинематикой.
Передняя кинематика
Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рамка
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал
Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот
Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из системы намотки (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Самотечная загрузка
Сила, прилагаемая вниз, из-за веса манипулятора робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373), а также «захватывания» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между своими «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Ручная
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.
Ручное управление
Совместная функция, позволяющая оператору вручную направлять робота в желаемое положение. Эта задача может быть решена за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Гармонический привод
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень
Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение
Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Удерживать
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение
Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК
Международная электротехническая комиссия
Индуктивный датчик
Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглощает достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в определенной близости. См. Датчик приближения.
Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМ
Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать свои основные возможности для выполнения определенного набора ожиданий, а также описывать роботу посредством определения параметров и условий, какие ожидания возникают в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода
Разнообразие устройств, позволяющих взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт для программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция
Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд
Время, которое требуется циклу системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор
Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот
Робот, который можно запрограммировать на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех
Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция
Метод создания путей к конечным точкам. Как правило, для задания движения определяется несколько узловых точек, прежде чем все промежуточные положения между ними вычисляются с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO
Международная организация по стандартизации
ISO 10218-1 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы
Специализированная спецификация безопасности робота, которая касается требований производителя, функциональности, требуемых характеристик безопасности, опасностей, защитных мер и документации для самого робота.
ISO 10218-2 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 2: Роботизированные системы и интеграция
Сопутствующий документ ISO 10218-1. Эта спецификация безопасности представляет собой руководство как для конечных пользователей, так и для интеграторов роботов в части безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Коллаборативные роботы
Предоставляет подробные инструкции, отсутствующие в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби
Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА
JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Соединение
Часть системы манипулятора, которая обеспечивает вращение и / или поступательную степень свободы звена рабочего органа.
Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и размещения для конкретного движения.
Тип шарнирного движения
Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство
а. Совместное пространство (или совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.
Соединения
Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартового робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковш
Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер
Акроним от «Усиление света за счет вынужденного излучения». Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают в себя: определение расстояния, определение точного местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип движения
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.
Ссылки
Статический материал, который соединяет суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки
Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные детекторы
Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор
Механизм машины или робота, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373)
См. Руку, запястье и рабочий орган
Ручной режим
См. Режим обучения.
Погрузочно-разгрузочные работы
Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, что он может обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, в период между моментом первого захвата материалов и моментом их выпуска в производственный процесс.
Функция сдвига зеркала
С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на следующие три: функция импульсного зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима
В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность
Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые можно легко соединить или скомпоновать с другими частями или узлами.
Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения
Линия, определяющая ось движения линейного или поворотного сегмента манипулятора.
Двигатель
См. Серводвигатель.
Отключение звука
При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или его части.
Автономное программирование
Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода информации для программирования роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и на сборочных линиях из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор
Лицо, уполномоченное запускать, контролировать и останавливать предполагаемую продуктивную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация
Угол, образованный большой осью объекта относительно базовой оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.См. Roll, Pitch и Yaw.
Паллетирование
Организованный процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) На поддоне.
Функция PAM — регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного сдвига
Параллельный сдвиг означает сдвиг объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного смещения, показанной ниже, значение смещения может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, потому что ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения обученного пути (или положения). В примере на рисунке ниже обученная позиция A сдвигается с шагом на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь
Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимум
Максимальная масса, которой робот может манипулировать при указанной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и воспроизводимости при непрерывной работе в указанном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Обучающий кулон]
Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в памяти робота.
Подвесное обучение
Отображение и запись положения и ориентации системы робота и / или манипулятора по мере того, как робот вручную поэтапно перемещается от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, база робота и т. Д.) Записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на пути к своей конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, сохраненному в базе данных.
Уровень эффективности d (PLd)
Уровень эффективности (PL) ISO «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до <10-6.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень эффективности, указанный в ISO 10218-2, раздел 5.2.2, если оценка риска не позволит использовать более низкое значение.
Уровень эффективности e (PLe)
Уровень эффективности ISO (PL) «e» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-8 до <10-7.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.
Цикл выбора и размещения
Время, необходимое манипулятору, чтобы поднять объект и поместить его в желаемое место, а затем вернуться в исходное положение. Это включает время во время фаз ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка запрограммирована в управляющую память робота, а затем воспроизводится во время рабочего цикла.
Задача по подбору и размещению
Повторяющаяся задача переноса детали, состоящая из действия подбора, за которым следует действие по размещению.
Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека может оказаться зажатым между движущимися частями машины, или между движущейся и неподвижной частями машины, или между материалом и любой частью машины. .Точка защемления не должна приводить к травме конечности или части тела, хотя может привести к травме — она должна только защемить или ущипнуть человека, чтобы он не смог вырваться или вынуть защемленную часть из точки защемления.
Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки робота-манипулятора.
См. Roll and Yaw.
Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения для выполнения программы робота.В режиме воспроизведения воспроизводится программа робота. Это режим, в котором роботы используются в производстве.
Воспроизведение
Воспроизведение — это операция, при которой воспроизводится обученное задание. Эта функция используется, чтобы решить, где возобновить воспроизведение при запуске операции после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: запускает операцию, когда курсор находится в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится в том месте, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновляется с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY — задание запускается кнопкой [СТАРТ] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний пусковой вход).
Точка-точка
Движение манипулятора, в котором задано ограниченное количество точек на прогнозируемой траектории движения.Манипулятор перемещается от точки к точке, а не по непрерывной плавной траектории.
Поза
Альтернативный термин для конфигурации робота, который описывает линейное и угловое положение. Линейное положение включает азимут, высоту и дальность до объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. См. Roll, Pitch и Yaw.
Позиция
Определение местоположения объекта в трехмерном пространстве, обычно определяемое трехмерной системой координат с использованием координат X, Y и Z.
Уровень позиции
Уровень положения — это степень приближения манипулятора к запрограммированному положению. Уровень позиции может быть добавлен к командам перемещения MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. Установка соответствующего уровня перемещает манипулятор по траектории, подходящей для окружающих условий и обрабатываемой детали. (см. рисунок справа)
Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в трехмерном пространстве, обычно определяемого трехмерной системой координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в задание.
Ограничение мощности и усилия (PFL)
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться для определения того, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Устройство защиты от присутствия
Устройство, разработанное, сконструированное и установленное для создания сенсорного поля для обнаружения вторжения в такое поле людьми, роботами или объектами. См. Датчик.
Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода / вывода, памяти и устройства программирования, в котором обычно используются эквивалентные символы реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.
Программируемый робот
Функция, позволяющая проинструктировать робота выполнить последовательность шагов, а затем выполнять эту последовательность повторяющимся образом.Затем его можно перепрограммировать для выполнения другой последовательности шагов, если это необходимо.
Датчик приближения
Бесконтактное сенсорное устройство, используемое для определения, когда объекты находятся на небольшом расстоянии, и оно может определять расстояние до объекта. Несколько типов включают: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного счета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.
Координаты импульса
Роботы Yaskawa определяют положение осей шарниров робота в градусах для поворотных шарниров.Импульс — это еще один способ указать положение сустава робота, и он используется при подсчете импульсов энкодера двигателя робота.
Обеспечение качества (ОК)
Описывает методы, политику и процедуры, необходимые для проведения тестирования обеспечения качества во время проектирования, производства и доставки этапов создания, перепрограммирования или обслуживания роботов.
Досягаемость: Объем пространства (конверт), которого может достичь рабочий орган робота, по крайней мере, в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между движущейся частью роботизированной системы и другой неподвижной или движущейся частью робототехнической ячейки
Вылет
Объем пространства (оболочки), которого может достичь рабочий орган робота хотя бы в одной ориентации.
Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в рамках временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров (выходов) управления системой, необходимых для правильной работы системы или процесса. От компьютера требуется, чтобы он выполнял свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через оконечное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базой данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.
Робот для воспроизведения записи
Манипулятор, для которого критические точки вдоль желаемых траекторий сохраняются последовательно путем записи фактических значений кодеров положения суставов робота, когда он перемещается под операционным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.
Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Рабочий конверт.
Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или объема использования (R15.02). Также называется: время безотказной работы робота или среднее время наработки на отказ (MTBF).
Восстановление
Для обновления или модификации роботов в соответствии с пересмотренными спецификациями производителя. (R15.06)
Удаленный режим
Удаленный режим — это тип режима воспроизведения, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с обучающего пульта). В этом режиме использование обучающего пульта отключено.
Повторяемость
Мера того, насколько близко рука может повторно занять заданное положение.Например: после того, как манипулятор вручную помещен в определенное место, и это местоположение определено роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное местоположение. Степень разрешения в системе управления роботом определяет повторяемость. В общем, воспроизводимость руки никогда не может быть лучше, чем ее разрешение. См. «Обучение и точность».
Разрешение
Количество шарнирного движения робота, необходимое для изменения положения на один счет.Хотя разрешение каждого датчика совместной обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах не является постоянным для поворотных рычагов из-за нелинейности кинематики рычага.
Поворотный шарнир
Суставы робота, способные к вращательному движению.
Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет прогнозируемых опасностей и последующего определения уровня риска, связанного с идентифицированными задачами.
Снижение рисков
Вторичный шаг в процессе оценки риска, который включает снижение уровня риска для идентифицированных задач путем применения мер по снижению риска с целью устранения или смягчения опасностей.
Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или определенных устройств посредством переменных запрограммированных движений для выполнения множества задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Рабочий орган.
Система координат робота
Система координат робота определяется в базовой оси робота, а точки в системе координат робота будут относиться к базе робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота одинаковы. (см. рисунок справа)
Робот-интегратор
См. Интегратор.
Язык программирования роботов
Интерфейс между человеком-пользователем и роботом, который связывает человеческие команды с роботом.
Робот, контролирующий пределы диапазона
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасности
Моделирование роботов
Метод имитации и прогнозирования поведения и работы роботизированной системы на основе модели (например, компьютерной графики) физической системы. (R15.07)
Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Pitch and Yaw.
Поворотный шарнир
Сустав, который скручивается, качается или изгибается вокруг оси.
Поворотный векторный привод (RV)
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси. См. Cyclo Drive и Harmonic Drive.
Вращательное движение
Сустав, который скручивается, качается или изгибается вокруг оси. Примером этого является локоть человеческой руки.
Гарантия
Барьерное ограждение, устройство или защитная процедура, предназначенные для защиты персонала. (R15.06)
Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод IEC для определения уровня производительности системы безопасности. SIL 2 соответствует уровню эффективности ISO «d», а SIL 3 соответствует уровню эффективности ISO «e». ISO 10218 допускает использование того и другого.
Логическая цепь безопасности
Логическая схема безопасности контролирует критически важные для безопасности внешние устройства, такие как световые завесы и генерируемые сигналы FSU.Логическая схема безопасности программируется через интуитивно понятный пользовательский интерфейс, поддерживаемый подвесным пультом программирования Yaskawa. Это позволяет настроить логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.
Остановка с контролем безопасности
Совместная функция, разработанная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекратится, безопасность человека перейдет в рабочее пространство для совместной работы. Сервоприводы могут оставаться под напряжением в соответствии с остановкой категории 2 в соответствии с ISO 10218-1: 2011, 5.4. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Робот SCARA
Цилиндрический робот, имеющий два параллельных шарнирных соединения (горизонтально шарнирно сочлененных) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA является производным от селективно совместимой руки для роботизированной сборки
Вторая исходная позиция
Помимо «исходного положения» манипулятора, второе исходное положение можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения — это исходное положение (где все оси находятся на импульсе 0). Вторую исходную позицию можно изменить.
Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают в себя: режим работы, режим редактирования, режим управления, режим безопасности и режим одноразового управления.
Датчик
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся окружающей среды робота, а также собственное позиционирование робота.Датчики реагируют на физические стимулы (такие как тепло, свет, звук, давление, магнетизм и движение) и передают результирующий сигнал или данные для измерения, управления или того и другого. (R15.06)
Сенсорная обратная связь
Переменные данные, измеряемые датчиками и передаваемые на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер отправляет роботу сигнал об ошибке.Робот вносит необходимые корректировки в соответствии с сигналом ошибки.
Сервоуправление
Процесс, с помощью которого система управления роботом проверяет, соответствует ли достигнутая поза робота позе, заданной при планировании движения, с требуемыми характеристиками и критериями безопасности. (ISO 8373)
Серводвигатель
Электроэнергетический механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.
Сервопривод
Электроэнергетический механизм переменного тока, управляемый с помощью логики для преобразования энергии источника питания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемую на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и контроль торможения.
Робот с сервоприводом
Управление роботом с помощью сервосистемы с замкнутым контуром, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Замкнутую систему и Сервосистему.
Сервосистема
Система, в которой контроллер выдает команды на двигатели, двигатели приводят в движение рычаг, а датчик энкодера измеряет вращательные движения двигателя и сообщает о величине движения обратно контроллеру. Этот процесс повторяется много раз в секунду, пока рука не переместится в требуемую точку. См. Сервоуправляемый робот
Функция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает влияние столкновения робота путем остановки манипулятора без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.
Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных систем или систем с двумя руками, таких как Yaskawa Motoman® SDA10D.
SIL
См. Уровень полноты безопасности
Моделирование
Графическая компьютерная программа, представляющая робота и его окружающую среду, которая имитирует поведение робота во время имитации запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать команду роботу выполнить такие задачи. Рассматриваются следующие элементы моделирования: 3D-моделирование окружающей среды, эмуляция кинематики, эмуляция планирования пути и моделирование датчиков. См. Сенсор, Прямая кинематика и Робот.
Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся коаксиальными (выровненными по общей оси). В особой конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т. Е. Не имеет обратной) в этих конфигурациях.
SLURBT
SLURBT — это термины, которые Yaskawa Motoman использует для описания каждой оси робота для удобства. Определение каждого значения следующее:
S — качели или вертлюги
L — нижний рычаг
U — Верхняя рука
R — повернуть
B — Колено
Т — Twist
Функция настройки мягкого лимита
Функция настройки Softlimit — это функция для установки диапазона ограничения перемещения оси движения манипулятора в программном обеспечении.
Контроль скорости и разделения
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Сплайн
Гладкая непрерывная функция, используемая для аппроксимации набора функций, которые однозначно определены на наборе подинтервалов. Аппроксимирующая функция и набор аппроксимируемых функций пересекаются в достаточном количестве точек, чтобы обеспечить высокую степень точности приближения. Назначение плавной функции — позволить роботу-манипулятору выполнить задачу без рывков.
Сплайн Тип движения
Расчетный путь, который выполняет робот, который может иметь параболическую форму.Сплайновое движение может также создавать кривую произвольной формы со смесью круглых и параболических форм.
Системный интегратор
См. Интегратор.
Обучение
Чтобы запрограммировать руку манипулятора, вручную направляя ее через серию движений и записывая положение в памяти контроллера робота для воспроизведения.
Блокировка обучения
Пока установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться ни с помощью [СТАРТ], ни с внешнего входа.В целях безопасности всегда устанавливайте переключатель режима в положение «ОБУЧЕНИЕ» перед началом обучения.
Режим обучения
Режим контроллера робота, в котором робот-манипулятор программируется путем ручного управления им через серию движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, у которых нет активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя включения в режиме обучения.
Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с подвесками для программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.
Окно обучения
Окно обучения — это экран пользовательского интерфейса на пульте программирования. Это окно содержит окно СОДЕРЖАНИЕ ЗАДАНИЯ, и в этом окне проводится обучение. Окно СОДЕРЖАНИЕ ЗАДАНИЯ содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. Д.
Поперечная балка
Система обнаружения объектов, используемая в системе датчиков изображения робота. Точно сфокусированный луч света закреплен на одном конце, а детектор — на другом. Когда луч света прерывается, объект ощущается.
Функция измерения времени
Функция измерения времени измеряет время выполнения указанного раздела в задании или время вывода указанного сигнала.
Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, установленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. Д.См. «Рука», «Захват» и «Рабочий орган».
Инструмент и рука Вмешательство
В системе с одним контроллером и несколькими манипуляторами можно использовать функцию проверки вмешательства инструмента и рычага для обнаружения возможных помех и предотвращения столкновения во время работы. Можно проверить следующие три шаблона:
Плечо против руки
Рычаг против инструмента
Инструмент против инструмента
Интерференция проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.На обоих концах цилиндра помещается сфера. Если цилиндр и сферы одного манипулятора во время движения контактируют с цилиндрами другого манипулятора, манипуляторы останавливаются из-за обнаружения помех.
Центр инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на конце сварочного пистолета. После определения и настройки TCP движение робота будет определено относительно этого кадра (т.е., вращение в направлении Rx вызовет вращение вокруг оси X, и позиции будут обучаться в этом кадре.
Контрольная точка инструмента
См. Центр инструмента
Координаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, его система координат инструмента движется вместе с фиксированной системой координат, например мировыми координатами. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.
Рама для инструментов
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).
Датчик касания
Чувствительное устройство, иногда используемое с рукой или захватом робота, которое определяет физический контакт с объектом, тем самым давая роботу искусственное ощущение осязания. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.
Построение траектории (расчет)
Вычисление функций движения, которые позволяют плавно контролировать движение суставов.
Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Обычно это устройство, преобразующее входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или доступны для работы, в отличие от времени простоя.
Настройка координат пользователя
Координаты пользователя определяются тремя точками, которые были обучены манипулятору с помощью осевых операций.Этими тремя определяющими точками являются ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — это исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y от пользовательских координат, которые были обучены, а направления осей Y и Z определяются точкой XY.
Пользовательская система координат
Пользовательская система координат — это любая контрольная точка, которую пользователь определил для своего приложения.Он часто прикрепляется к объекту, например к поддону, и позволяет пользователю обучать точкам относительно этого объекта. Например, набор положений может быть обучен относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенесен в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. Также «Настройка координат пользователя
Ручной вакуумный стакан
Конечный эффектор для манипулятора робота, который используется для захвата объектов легкого и среднего веса с помощью всасывания для манипуляций.К таким предметам может относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении скольжения предмета, когда он находится в пределах досягаемости вакуумной чашки. См. «Концевой эффектор».
Визуальное сопровождение
Система управления, в которой траектория робота изменяется в ответ на ввод от системы технического зрения.
Датчик технического зрения
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например, телекамеры.
Рабочий пакет
Набор всех точек, до которых манипулятор может добраться без вторжения. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочий диапазон.
Рабочий конверт (космос)
Объем пространства, в котором робот может выполнять поставленные задачи.
Работа в исходном положении
Исходное рабочее положение является ориентиром для операций с манипулятором.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в пределах установленного диапазона в качестве предварительного условия для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта программирования или ввода сигнала с внешнего устройства. Когда манипулятор находится в непосредственной близости от исходного рабочего положения, включается сигнал рабочего исходного положения.
Заготовка
Любая деталь, которая обрабатывается, совершенствуется или изготавливается до того, как станет готовым продуктом.
Рабочее пространство
Объем пространства, в котором робот может выполнять поставленные задачи.
Мировые координаты
Справочная система координат, в которой рычаг манипулятора движется линейно по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Прямоугольные координаты.
Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.Поскольку объекты обнаруживаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определять свои действия для выполнения поставленных задач.
Запястье
Набор поворотных шарниров между манипулятором и рабочим органом робота, которые позволяют ориентировать рабочий орган по отношению к обрабатываемой детали. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканью.См. Раздел «Рука», «Рабочий орган», «Крен», «Шаг», «Рыскание» и «Деталь».
Запястье [вторичная ось]
Набор взаимосвязанных звеньев и механических соединений между рычагом и рабочим органом, который поддерживает, позиционирует и ориентирует рабочий орган. (ISO 8373)
Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Боковое движение по оси. Смотрите Roll and Pitch.
Нормализация относительного движения — libinput 1.13.4 документация
Большинство устройств относительного ввода генерируют ввод в виде так называемых «микки». А Микки находится в единицах, зависящих от устройства, которые зависят от разрешения датчика. Большинство оптических мышей используют датчики с разрешением 1000 точек на дюйм, но на некоторых устройствах разрешение составляет от 100 до 8000 точек на дюйм.
Без физической точки отсчета относительная координата не может быть истолковано правильно. Дельта в 10 микки может быть миллиметром физическое движение или 10 миллиметров, в зависимости от датчика.Этот влияет на ускорение указателя в libinput и интерпретацию относительных координаты в звонилках.
libinput выполняет частичную нормализацию относительного ввода. Для устройств с разрешение 1000dpi и выше, события движения нормализуются до значения по умолчанию 1000 dpi до применения ускорения указателя. В результате устройства с 1000 dpi и выше — то же самое.
Устройства с разрешением менее 1000 точек на дюйм не нормализуются (нормализация единицы из 1 устройства). движение мыши с разрешением 400 точек на дюйм вызовет ошибку 2.5 пикселей движения). Вместо, libinput применяет функцию ускорения, зависящую от dpi. На малых скоростях Перемещение единицы устройства обычно переводится в перемещение на 1 пиксель. Как увеличивается скорость движения, применяется ускорение — на высоких скоростях низкое dpi устройство будет примерно так же, как мышь с более высоким dpi.
Эта нормализация применяется только к ускоренным координатам, без ускорения. координаты оставлены в единицах устройства. Звонящий должен интерпретировать эти координаты правильно.
Нормализация координат тачпада
Сенсорные панелимогут иметь разное разрешение по горизонтали и вертикали. ось.Интерпретация координат с тачпада без снятия разрешения во внимание приводит к неравномерному движению.
libinput масштабирует неускоренное движение сенсорной панели до разрешения
ось x сенсорной панели, т. е. неускоренное значение оси y: y = (x / разрешение_x) * разрешение_y .
Настройка пользовательских настроек DPI
Устройства обычно не рекламируют свое разрешение, а libinput полагается на
свойство udev MOUSE_DPI для этой информации.Это свойство обычно
устанавливается через
udev hwdb.
Утилита mouse-dpi-tool , предоставляемая
libevdev должен быть
используется для измерения разрешения устройства.
Формат свойства для мышей с одним разрешением:
MOUSE_DPI = разрешение @ частота
Разрешение в точках на дюйм, частота в Гц. Формат свойства для мышей с разным разрешением может включать несколько разрешения и частоты:
MOUSE_DPI = r1 @ f1 * r2 @ f2 r3 @ f3
Частота по умолчанию должна быть предварительно отмечена звездочкой.
Например, эти два свойства действительны:
MOUSE_DPI = 800 @ 125 MOUSE_DPI = 400 @ 125 800 @ 125 * 1000 @ 500 5500 @ 500
Поведение искаженного свойства не определено. Если собственность unset, libinput предполагает разрешение 1000 точек на дюйм.
Обратите внимание, что HW обычно не предоставляет информацию о времени выполнения. изменения разрешения, libinput, таким образом, не будет определять, когда разрешение изменяется на значение, отличное от значения по умолчанию.
3 Технологии ввода / вывода: текущее состояние и потребности в исследованиях | Больше, чем в глубину экрана: к интерфейсу каждого гражданина с информационной инфраструктурой страны
Стр. Решебника 118
3.У Texas Instruments была ранняя система естественного языка, которая сделал это.
4. Этот пример обсуждался Джоном Томасом из NYNEX на цех.
5. Каскадные синтезаторы достигают синтеза путем конкатенации небольшие сегменты (например, дифоны) сохраненной оцифрованной речи. Formant синтезаторы используют подход, основанный на правилах, для достижения синтеза, путем задание акустических параметров, характеризующих цифровой фильтр и как эти параметры меняются при изменении разных фонем последовательность.
6. Личное сообщение, Джон К. Томас, NYNEX, 12 декабря, г. 1996.
7. Система распознавания голоса, представленная IBM в 1996 году. программное обеспечение было разработано, чтобы позволить рентгенологам диктовать отчеты в персональный компьютер. Распознавать 2000 слов и требовать некоторое обучение, его поддержка разговорного дискурса, в контекст, в котором могут часто использоваться определенные технические фразы, был противопоставляется в прессе необходимости делать паузу после отдельных слов в более старом коммерческом программном обеспечении (Zuckerman, 1996).
8. Кэндис Сиднер из Lotus Development и Раймон Перро, из НИИ, внесла значительную часть в содержание этого подраздела.
9. Индексирование и поиск представляют собой растущую область применения, особенно с повышенным желанием организовать и получить доступ к большим объемы данных, большая часть которых доступна в виде текста.
10. Этот раздел посвящен современному состоянию полные системы непрерывной обработки естественного языка и не описывать исследования в отдельных областях.Руководящий комитет отмечает, что был достигнут значительный прогресс, начиная от новых грамматические формализмы к подходам к лексической семантике диалоговые модели.
11. Есть много многообещающих исследований синтаксических моделей, таких как как TAG (древовидные грамматики) работают (см. Joshi et al., 1981, 1983, 1995; Shieber, 1983), которые легко поддаются вычислению. синтаксические формализмы с большей мощностью, чем контекстно-свободные грамматики, и по лексической семантике.
12. Хотя здесь недостаточно места для включения подробных ссылок, заинтересованный читатель обращается, в частности, к недавнему лет конференции Ассоциации вычислительных Лингвистика, Европейская ассоциация вычислительной техники. Лингвистика, международная встреча по компьютерной лингвистике (COLING), семинары DARPA Spoken Language и MUC, а также журналы Искусственный интеллект, Компьютерная лингвистика , и Машинный перевод .
13. Для приложений, использующих запросы к базе данных, или для других сложное командование и контроль, соответствие между последовательностью слов и их значения могут быть действительно очень сложными. DARPA профинансировал прикладные исследования в области понимания языков (Roe, Wilpon, 1994; Cole et al., 1996) в контексте запрос к базе данных, где пользователь запрашивает ответ на запрос по ввод или произнесение запроса. В понимании большинства языков систем на сегодняшний день набор синтаксических и / или семантических правил применяется к запросу, чтобы получить его значение, которое затем используется для получить ответ.Если запрос относится к информации, полученной в предыдущие запросы, другой набор правил, касающихся дискурса, используется для устранения неоднозначности значения. Прагматическая информация о конкретное приложение также часто закодировано в правилах. Даже для простого приложения, такого как поиск информации о путешествиях по воздуху, сотни лингвистических правил вручную кодируются вычислительными лингвисты. Многие из этих правил необходимо переписывать для каждого нового заявление.
14.Консорциум лингвистических данных при Университете Пенсильвания, спонсируемая государством и промышленностью, сейчас делает большую часть этих данных доступной из разных источников для разные задачи, и на разных языках.
15. Обратите внимание, что портативные устройства поднимают большую проблему данных. долговечность: портативные устройства легче потерять или сломать, что вызывает вопросы о простоте резервного копирования данных, которые они содержать.
16. Большая часть межотраслевых разногласий вращалась вокруг чересстрочная развертка, техника, которая давно используется на телевидении для увеличьте разрешение, и это воспользуется преимуществом
Указывающие устройства | Энциклопедия.com
На заре компьютеров команды и данные вводились с клавиатуры. На ранних экранах компьютерных мониторов положение ввода текста обозначалось мигающим подчеркиванием или вертикальной полосой, называемой курсором. Сначала пользователи не могли контролировать положение этого курсора; позже клавиши со стрелками и ключевые команды позволили пользователям выбирать точки ввода текста. В более поздних В операционных системах, которые используют графический интерфейс пользователя (GUI) , курсор по-прежнему указывает точку, где можно ввести текст, но это также видимый и движущийся экранный указатель, управляемый с помощью устройства ввода, такого как мышь.Оператор компьютера использует указывающий курсор , чтобы установить, где должен быть размещен курсор индикатора положения , или для выбора программы для выполнения или файла для просмотра. Обычно указывающий курсор появляется на экране в виде стрелки.
Поскольку на раннем этапе использования компьютера команды с клавиатуры были трудными для изучения и непонятными для некомпьютерных специалистов, производители компьютеров и разработчики программного обеспечения быстро приняли на вооружение интерфейсы с функцией «укажи и щелкни», впервые популяризированные Apple Macintosh.Однако стрелки на клавиатуре больше не подходили для перемещения курсора по экрану. Концепция «укажи и щелкни» требовала от пользователя перемещения чего-либо, вызывающего соответствующее движение на экране. Это привело к разработке устройств ввода, таких как мышь, джойстик и других инструментов для управления перемещением курсора на экране. Хотя мышь и ее потомки не заменяют клавиатуру, они дополняют клавиатуру в задачах, для которых она плохо подходит.
Общие указывающие устройства
Общие указывающие устройства, используемые для управления движением на экране, включают компьютерные мыши, сенсорные панели, сенсорные экраны, джойстики, графические планшеты и трекболы. Некоторые из этих устройств, включая мышь и джойстик, могут быть добавлены в компьютерную систему в соответствии с потребностями пользователя. Другие устройства, такие как сенсорные экраны, интегрированы в специализированные компьютерные системы, предназначенные для определенных целей.
Компьютерная мышь.
Компьютерная мышь — это небольшое портативное указывающее устройство с интерактивным вводом, которое при наведении курсора на плоскую поверхность управляет размещением курсора на экране компьютера.Компьютерная мышь аналогична живой мыши в том, что она размером с ладонь, имеет форму мыши с закругленными углами. Первоначально все мыши были подключены к компьютерам проводом, напоминающим хвост; однако сейчас доступны и беспроводные мыши.
Мышь может быть одно-, двух- или трехкнопочной. После того, как пользователь помещает курсор на дисплей компьютера, перемещая мышь, действием на экране можно управлять с помощью одного или нескольких щелчков кнопок мыши. Иконки на экране можно активировать одним щелчком мыши или перетаскивать по дисплею компьютера одним щелчком, удерживаемым при перемещении мыши из одного места в другое.
Традиционные компьютерные мыши — это электромеханические устройства. Выступающий снизу стальной шарик с резиновым покрытием обнаруживается двумя ортогональными роликами , которые также касаются шарика внутри пластикового корпуса. Эти ролики действуют как преобразователи для преобразования скорости и направления катящегося шара в электрические сигналы, которые отправляются программному драйверу для перемещения курсора на экране. Чтобы обеспечить лучшее сцепление с катящимся мячом, мышкой обычно управляют на плоской подушке из пенопласта с мягкой подкладкой.
Есть также два других вида мышей: оптические мыши и оптомеханические мыши. Оптическая мышь не имеет колес или шариков, а вместо этого зависит от светоизлучающего диода (LED) и фотодетектора. Когда мышь перемещается по сетке из близко расположенных линий на специально разработанном коврике для мыши, фотодетектор обнаруживает пересечения линий по изменениям отраженного света. Оптомеханическая мышь сочетает в себе характеристики оптической мыши и стандартной электромеханической мыши: она состоит из движущегося шарика и стержней с прорезями, через которые может проходить свет.Во время движения мыши валы вращаются, и световые импульсы попадают на фотоприемник через щели. Величина движения курсора пропорциональна количеству обнаруженных световых импульсов. Для оптомеханических мышей не требуется никаких специальных ковриков, и они менее уязвимы к сбоям, связанным с пылью и грязью, чем механические мыши.
Общим для всех типов мышей является последовательный обмен данными, отправляемый обратно на компьютер каждый раз, когда мышь перемещается на определенное расстояние (например, 0,25 миллиметра или 0.01 inch или mickey ) — один байт для перемещения по оси x, один байт для перемещения по оси y и один или два байта для состояния кнопки. Программное обеспечение нижнего уровня в компьютере преобразует относительные движения мыши в абсолютное положение курсора на дисплее.
Сенсорные панели.
Там, где использование мыши было бы неудобным, например, в конфигурации портативного компьютера, или движение курсора важнее символов, тачпады стали популярными. Как правило, они встроены в компьютерный блок и часто включают в себя нажимаемые кнопки, соответствующие кнопкам мыши.Под верхним слоем тачпада находятся два или более слоя, разделенных непроводящим диэлектриком ; каждый слой содержит сетку из рядов и столбцов электродов. Различные слои создают между собой емкость (электрическое поле), которая может резко измениться электрическим полем человеческого пальца, касающегося сенсорной панели или перемещающегося рядом с ней. Изменения емкости измеряются 100 раз в секунду и переводятся в движение курсора.
Сенсорные экраны.
Сенсорный экран — это экран дисплея компьютера, чувствительный к прикосновениям человека, позволяющий экрану функционировать как устройство указания ввода.Пользователь касается самого экрана, чтобы вызвать какое-то действие.
Существует три типа сенсорных экранов. Панель с резистивным сенсорным экраном покрыта тонким металлическим, электропроводящим и резистивным слоем, который вызывает изменение электрического тока, которое регистрируется как событие касания и отправляется на контроллер для обработки. Сенсорный экран с поверхностными волнами использует ультразвуковые волны, которые проходят по сенсорной панели. При прикосновении к панели часть волны поглощается, и это изменение ультразвуковых волн регистрирует положение события касания и отправляет эту информацию контроллеру для обработки.Емкостная сенсорная панель покрыта материалом, накапливающим электрические заряды. При прикосновении к панели к точке соприкосновения переносится небольшой заряд. Цепи, расположенные в каждом углу панели, измеряют заряд и отправляют информацию контроллеру для обработки.
Резистивные сенсорные панели, как правило, самые доступные, но они обеспечивают только 75-процентную четкость, и слой может быть поврежден острыми предметами. Панели с резистивным сенсорным экраном не подвержены воздействию внешних элементов, таких как пыль или вода.Сенсорные панели с поверхностной волной являются наиболее совершенными из трех типов, но они могут быть повреждены внешними элементами. Сенсорные экраны особенно популярны в очень маленьких компьютерах, поскольку они устраняют необходимость в клавиатуре. Они также обычно используются в розничных сетях, таких как заправочные станции, банкоматы, рестораны и информационные киоски.
Джойстики.
Джойстики похожи на мыши в том, что они передают на компьютер координаты руки X-Y для позиционирования курсора на экране.Джойстик соединен с ярмом, которое свободно поворачивается во всех направлениях. Датчики обнаруживают движение и генерируют соответствующие электрические токи, которые интерпретируются микроконтроллером как движение курсора. У более поздних моделей джойстиков также есть «кнопка в виде шляпы» или контактный переключатель, который можно нажать, чтобы активировать экранную активность. Джойстики чаще всего используются в компьютерных играх и симуляторах, чтобы предоставить пользователям гибкость и быстрое время отклика при взаимодействии с экранными событиями.
Графические планшеты.
Оцифрованные графические планшеты позволяют художникам переводить точные движения пера в линии на экране. Они также могут «читать» почерк пользователя с помощью специального программного обеспечения. Графические планшеты используют различные технологии, в том числе чувствительные к давлению датчики, оптические датчики, магнитные датчики и емкостные датчики для определения положения пера на планшете. Некоторые планшеты требуют использования специальной ручки, прикрепленной к планшету, в то время как другие позволяют использовать любой заостренный предмет, в том числе деревянный карандаш.Разрешение и точность графического планшета зависит от используемой технологии. Графические планшеты можно использовать в качестве замены мыши, но они особенно подходят для рисования.
Трекболы.
Трекбол — это компьютерное устройство управления курсором, которое обычно встраивается в переднюю часть клавиатуры рядом с пользователем. По сути, трекбол — это перевернутая мышь, которая вращается внутри гнезда. Пользователь сначала катит шарик, чтобы направить курсор в желаемое место на экране, а затем нажимает одну из двух кнопок (идентичных кнопкам мыши) рядом с трекболом, чтобы выбрать объекты рабочего стола или установить курсор для ввода текста.Как и тачпад, это указывающее устройство используется в портативных компьютерах и других приложениях, где использование мыши было бы неудобно или неудобно.
Другие указывающие устройства
Менее широко используемые указывающие устройства включают в себя стики-указатели, похожие на ластик, встроенные в клавиатуры некоторых ноутбуков, а также портативные устройства, такие как световые ручки, которые были одними из первых устройств ввода, и устройства перьевого ввода. Указательные палочки или указывающие устройства с ластиком называются так потому, что они похожи на ластик карандаша, застрявший где-то между клавишами G и K на клавиатуре компьютера.Когда палец пользователя нажимает на головку ластика, давление передается на контакты под клавиатурой, что изменяет электрический ток; микроконтроллер преобразует переменный электрический ток в движение курсора на дисплее компьютера.
Устройства перьевого ввода и световые ручки позволяют пользователям обходить клавиатуру и вместо этого использовать знакомые движения рук при письме или рисовании для управления действиями на экране компьютера или ввода графики или текстовой информации. Фотодетектор на кончике светового пера реагирует на световые точки на экране, поэтому, когда световая точка на экране горит, световое перо уведомляет программу о том, что текущее местоположение является правильным.Перемещая перо по экрану, можно заставить курсор следовать за пером. Устройства перьевого ввода и световые перья позволяют активировать команду, выполнять задачу или рисовать. Программное обеспечение для распознавания рукописного ввода также разрабатывается для преобразования рукописного ввода на экране в текст.
см. Также Игровые контроллеры; Игры; Устройства ввода; Мышь.
Уильям Юрчик
Библиография
Колле, Ирил К. Решения для графических планшетов. Цинциннати, Огайо: Muska & Lipman Publishing, 2001.
Уайт, Рон. Как работают компьютеры, 6-е изд. Индианаполис, IN: Que, 2002.
Интернет-ресурсы
MouseSite.
Кажется, мы не можем найти эту страницу
(* {{l10n_strings.REQUIRED_FIELD}})
{{l10n_strings.CREATE_NEW_COLLECTION}} *
{{l10n_strings.ADD_COLLECTION_DESCRIPTION}}
{{l10n_strings.COLLECTION_DESCRIPTION}} {{addToCollection.description.length}} / 500 {{l10n_strings.TAGS}} {{$ item}} {{l10n_strings.PRODUCTS}} {{l10n_strings.DRAG_TEXT}}{{l10n_strings.DRAG_TEXT_HELP}}
{{l10n_strings.LANGUAGE}} {{$ select.selected.display}}{{article.content_lang.display}}
{{l10n_strings.AUTHOR}}{{l10n_strings.AUTHOR_TOOLTIP_TEXT}}
{{$ select.selected.display}} {{l10n_strings.CREATE_AND_ADD_TO_COLLECTION_MODAL_BUTTON}} {{l10n_strings.CREATE_A_COLLECTION_ERROR}}Определить пространственную привязку, проекцию или систему координат данных
Сводка
Данные ГИС и автоматизированного проектирования (САПР) часто поступают без пространственной справочной информации.Поскольку утилита ArcMap «Project on-the-fly» требует, чтобы проекции были определены таким образом, чтобы данные в ArcMap выровнялись, система координат данных должна быть идентифицирована и определена.
Приведенные инструкции описывают, как идентифицировать пространственную привязку, проекцию или систему координат данных.
Примечание: Перед тем, как продолжить, рекомендуется ознакомиться со статьей Основы проектирования: что нужно знать специалисту в области ГИС.
Процедура
Данные могут быть созданы в одной из трех систем координат:
Чтобы определить правильную систему координат, проверьте экстент набора данных.Определите, какой тип системы координат лучше всего соответствует информации экстента набора данных, и посетите соответствующую статью для этого конкретного типа системы координат.
- Изучите координатный экстент набора данных.
- Запустите ArcMap с новой пустой картой.
- Нажмите кнопку Добавить данные и добавьте данные с неизвестной системой координат в ArcMap.
- Щелкните правой кнопкой мыши имя слоя, выберите «Свойства» и выберите вкладку «Источник».
- В разделе «Экстент» обратите внимание на количество цифр слева от десятичной точки в верхней, нижней, левой и правой позициях.
- Добавьте знак минус (-), если координаты отрицательные.
- Игнорировать любые цифры справа от десятичной дроби.
- Сохраните эту информацию для сравнения со свойствами географической, прогнозируемой и локальной систем координат, как указано ниже.
- Определите, какой тип системы координат лучше всего соответствует информации экстента набора данных.
Географические системы координат
Географические системы координат (GCS) используют единицы измерения координат в десятичных градусах.Эти единицы часто упоминаются как «широта» и «долгота».
Десятичные градусы (DD) — это углы, и эти единицы измерения часто используются с данными ГИС, но редко с данными САПР.
Поскольку круг состоит из 360 градусов, координаты в DD никогда не могут быть больше трех цифр слева от десятичной дроби.
Координаты X — это значения долготы. Для данных в Северной Америке значения долготы должны быть отрицательными числами от 0 до -180. Координаты Y — это значения широты. Для данных в Северной Америке значения широты должны быть положительными числами от 0 до +90.
На рисунке ниже показано распределение положительных и отрицательных значений для координат долготы (X) и широты (Y) по всему миру.
Данные с координатами в десятичных градусах находятся в GCS. Эти данные могут быть созданы по огромному количеству различных датумов. Наиболее часто используемые датумы в Северной Америке — это датум Северной Америки 1927 г. (NAD 1927), датум Северной Америки 1983 г. (NAD 1983) и Всемирная геодезическая служба 1984 г. (WGS 1984). Чтобы определить систему координат для данных в географической системе координат, необходимо выбрать правильный GCS.
Примечание: Для получения дополнительной информации о датумах см. Что означают термины геоид, эллипсоид, сфероид и датум и как они связаны?
Если кажется, что информация экстента набора данных принадлежит географической системе координат, прочтите Какую географическую систему координат или датум мне следует использовать для моих данных?
Прогнозируемые системы координат
И ГИС, и данные САПР могут быть созданы с использованием систем координат проекции (PCS). Вместе с ArcGIS устанавливается широкий спектр предопределенных систем координат проекции, использующих различные единицы и датумы.В США наиболее часто используемыми системами координат проекции являются State Plane и Universal Transverse Mercator (UTM).
Чаще всего данные, проецируемые в эти системы координат, имеют экстент с шестью-восемью знаками слева от десятичной дроби.
Если кажется, что информация экстента набора данных принадлежит спроецированной системе координат, прочтите соответствующую статью ниже для вашей версии ArcGIS Desktop:
При использовании ArcGIS for Desktop 10.1, 10.2.x или 10.3.x, прочтите: Создайте собственный файл проекции для выравнивания данных САПР в ArcMap 10.1 и более поздних версиях.
Местные системы координат
Данные САПР часто создаются в локальной системе координат.
В отличие от данных в географической системе координат, которая имеет начало координат (координаты 0,0), где нулевой меридиан пересекает экватор у западного побережья Африки, локальная система координат может иметь начало (0,0) в любом месте поверхность земли.
Когда экстент набора данных имеет от трех до пяти цифр слева от десятичной дроби, это, скорее всего, находится в локальной системе координат.
Примечание: Данные САПР в локальной системе координат можно согласовать с другими данными в системе координат проекции в ArcMap, создав пользовательский файл проекции.
Если кажется, что информация экстента набора данных принадлежит локальной системе координат, прочтите Создание файла пользовательской проекции в ArcMap для выравнивания данных САПР.
Дополнительная информация
Последняя публикация: 09.10.2019
Идентификатор статьи: 000007880
Программное обеспечение: ArcMap 10.7.1, 10.7, 10.6.1, 10.6, 10.5.1, 10.5, 10.4.1, 10.4, 10.3.1, 10.3, 10.2.2, 10.2.1, 10.2, 10.1, 10
Полезно ли это содержание?
Системное программное обеспечение: служебное ПО, драйверы устройств и встроенное ПО — видео и стенограмма урока
Служебное программное обеспечение
Служебное программное обеспечение помогает управлять, обслуживать и контролировать ресурсы компьютера.Операционные системы обычно содержат необходимые инструменты для этого, но отдельные служебные программы могут обеспечить улучшенную функциональность. Служебные программы часто носят технический характер и ориентированы на пользователей, хорошо разбирающихся в компьютерах. Если вы используете компьютер в основном для электронной почты, просмотра Интернета и набора отчета, возможно, вам не нужны эти утилиты. Однако, если вы заядлый пользователь компьютера, эти служебные программы могут помочь убедиться, что ваш компьютер всегда в отличной форме.
Примерами служебных программ являются антивирусное программное обеспечение, программное обеспечение для резервного копирования и дисковые инструменты.Давайте рассмотрим каждый из них более подробно.
Антивирусное программное обеспечение, как следует из названия, помогает защитить компьютерную систему от вирусов и других вредоносных программ. Компьютерный вирус — это компьютерная программа, которая может вызвать повреждение программного обеспечения, оборудования или данных компьютера. Его называют вирусом, потому что он может реплицироваться и скрываться внутри других компьютерных файлов.
Один из наиболее распространенных способов заражения вирусом — загрузить файл из Интернета.Антивирусное программное обеспечение сканирует вашу онлайн-активность, чтобы убедиться, что вы не загружаете зараженные файлы. Новые вирусы появляются постоянно, поэтому антивирусное программное обеспечение необходимо очень часто обновлять.
Программа резервного копирования помогает в создании резервных копий файлов на вашем компьютере. В большинстве компьютерных систем для хранения данных используется жесткий диск. Хотя они, как правило, очень надежны, они могут выйти из строя или выйти из строя, что приведет к потере дорогостоящих данных. Программное обеспечение резервного копирования помогает копировать наиболее важные файлы на другое устройство хранения, например на внешний жесткий диск.Вы также можете сделать точную копию своего жесткого диска.
Программное обеспечение резервного копирования все чаще использует облачное хранилище для создания резервных копий. Обычно это означает, что вы платите комиссию за использование пространства хранения стороннего поставщика и используете их программное обеспечение для резервного копирования для управления файлами, для которых будет выполнено резервное копирование.
Дисковые инструменты включают в себя ряд различных инструментов для управления жесткими дисками и другими устройствами хранения. Сюда входят служебные программы для сканирования жестких дисков на предмет возможных проблем, средства очистки диска для удаления ненужных файлов и средства дефрагментации диска для реорганизации фрагментов файлов на жестком диске для повышения производительности.Дисковые инструменты важны, потому что отказ жесткого диска может иметь катастрофические последствия. Обеспечение эффективной работы дисков — важная часть общего обслуживания компьютера.
Драйверы устройств
Драйвер устройств — это компьютерная программа, которая управляет конкретным устройством, подключенным к вашему компьютеру. Типичными устройствами являются клавиатуры, принтеры, сканеры, цифровые камеры и внешние запоминающие устройства. Каждому из них для правильной работы нужен драйвер.
Драйверы устройств действуют как переводчик между операционной системой компьютера и подключенным к нему устройством. Для многих типов устройств необходимые драйверы встроены в операционную систему. Когда вы подключаете устройство, операционная система начинает искать нужный драйвер, устанавливает его, и вы готовы начать использовать устройство. Это называется plug-and-play и намного предпочтительнее ручной установки правильных драйверов.
Однако существует так много разных устройств, что не все они встроены в операционную систему.В качестве альтернативы операционная система может поискать в Интернете подходящий драйвер для установки. Однако многие аппаратные устройства поставляются с необходимыми драйверами. Например, если вы покупаете принтер, он может поставляться с компакт-диском, который обычно содержит правильный драйвер. Преимущество этого заключается в том, что производитель оборудования может убедиться, что у вас есть правильный драйвер для принтера.
Прошивка
Прошивка представляет собой комбинацию программного и аппаратного обеспечения. Он включает инструкции по управлению оборудованием, которое аналогично программному обеспечению.Он также включает аппаратное обеспечение в виде собственно микросхемы памяти, где хранятся инструкции. Технически микропрограммное обеспечение состоит из постоянного программного обеспечения, хранящегося в постоянной памяти.
Компьютерные системы используют специальный тип микропрограмм, известный как BIOS или базовая система ввода / вывода. Он представляет собой базовый код для запуска компьютера. Вы можете думать о BIOS как о прошивке для материнской платы вашего компьютера.
BIOS определяет, что компьютер может делать без доступа к программам с диска.Он содержит весь код, необходимый для управления клавиатурой, экраном дисплея, дисководами, последовательной связью и рядом других функций. BIOS обычно помещается в постоянное запоминающее устройство или ПЗУ, микросхему, которая поставляется вместе с компьютером — поэтому его часто называют ROM BIOS.
ROM — это тип энергонезависимого хранилища, что означает, что информация сохраняется, даже если компьютер теряет питание. В типичной компьютерной системе микросхема ПЗУ расположена на материнской плате. Это гарантирует, что BIOS всегда будет доступен и не будет поврежден из-за сбоев диска.Это также позволяет компьютеру загрузиться самостоятельно.
Может потребоваться обновление прошивки для исправления мелких ошибок или добавления функций на устройство. Например, возможно, у вас есть DVD-плеер, подключенный к вашему телевизору для воспроизведения фильмов, но он также может транслировать фильмы из потоковых онлайн-сервисов. В большинстве случаев вам не нужно вносить какие-либо изменения в ваш DVD-плеер, но время от времени вы можете получать сообщение на вашем телевизоре о том, что требуется какое-то обновление.
Обычно это обновление прошивки устройства.Поскольку ваше устройство настроено для подключения к Интернету, обновление можно загрузить и установить автоматически. Однако в некоторых устройствах прошивка постоянная и не может быть изменена.
BIOS компьютера может время от времени нуждаться в обновлении, но это не очень распространенное явление. Изменение BIOS обычно представляет собой задачу, выполняемую компьютерным специалистом, пытающимся отремонтировать компьютерную систему, которая не работает должным образом.
Краткое содержание урока
Системное программное обеспечение координирует действия и функции аппаратного и программного обеспечения, а также управляет работой компьютерного оборудования.Системное программное обеспечение включает операционные системы, служебное программное обеспечение, драйверы устройств и микропрограммное обеспечение. Операционные системы управляют компьютерным оборудованием и действуют как интерфейс с прикладными программами.